
Autonomous vehicle (AV) development requires massive amounts of sensor data for perception development.
Developers typically get this data from two sources—replay streams of real-world drives or simulation. However, real-world datasets offer limited flexibility, as the data is fixed to only the objects, events, and view angles captured by the physical sensors. It is also difficult to simulate the detail and imperfection of real-world conditions—such as sensor noise or occlusions—at scale.
Neural fields have gained significant traction in recent years. These AI tools capture real-world content and simulate it from novel viewpoints with high levels of realism, achieving the fidelity and diversity required for AV simulation.
At NVIDIA GTC 2022, we showed how we use neural reconstruction to build a 3D scene from recorded camera sensor data in simulation, which can then be rendered from novel views. A paper we published for ICCV 2023—which runs Oct. 2 to Oct.6—details how we applied a similar approach to address these challenges in synthesizing lidar data.
The method, called neural lidar fields, optimizes a neural radiance field (NeRF)-like representation from lidar measurements that enables synthesizing realistic lidar scans from entirely new viewpoints. It combines neural rendering with a physically based lidar model to accurately reproduce sensor behaviors—such as beam divergence, secondary returns, and ray dropping.
With neural lidar fields, we can achieve improved realism of novel views, narrowing the domain gap with real lidar data recordings. In doing so, we can improve the scalability of lidar sensor simulation and accelerate AV development.
By applying neural rendering techniques such as neural lidar fields in NVIDIA Omniverse, AV developers can bypass the time– and cost-intensive process of rebuilding real-world scenes by hand. They can bring physical sensors into a scalable and repeatable simulation.
Novel view synthesis
While replaying recorded data is a key component of testing and validation, it is critical to also simulate new scenarios for the AV system to experience.
These scenarios make it possible to test situations where the vehicle deviates from the original trajectory. It will view the world from novel views. This benefit also extends to testing a sensor suite on a different vehicle type, where the rig may be positioned differently (for example, switching from a sedan to an SUV).
With the ability to modify sensor properties such as beam divergence and ray pattern, we can also use a different lidar type in simulation than the sensor that originally recorded the data.
However, previous explicit approaches to simulating novel views have proven cumbersome and often inaccurate. First, surface representation—such as surfels or a triangular mesh—must be extracted from scanned lidar point clouds. Then, lidar measurements are simulated from a novel viewpoint by casting rays and intersecting them with the surface model.
These methods—known as explicit reconstruction—introduce noticeable errors in the rendering as well as assuming a perfect lidar model with no divergence of beams.
Neural lidar fields method
Rather than rely on an error-prone reconstruction pipeline, the neural lidar fields method takes a NeRF-style approach. It is based on neural scene representation and sensor modeling, which is directly optimized to render sensor measurements. This results in a more realistic output.
Specifically, we used an improved, lidar-specific volume rendering procedure, which creates range and intensity measurements from the 3D scene. Then, we added beam divergence for improved realism. We took into account that lidar works as an active sensor—rather than a passive one like a camera. This, along with characteristics such as beam divergence, enabled us to reproduce sensor properties, including dropped rays and multiple returns.
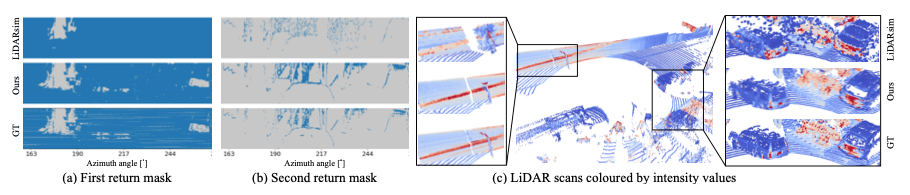
To test the accuracy of the neural lidar fields, we ran the scenes in a lidar simulator, comparing results with a variety of viewpoints taken at different distances from the original scan.
These scans were then compared with real data from the Waymo Open dataset, using metrics such as real-world intensities, ray drop, and secondary returns to evaluate fidelity. We also used real data to validate the accuracy of the neural lidar fields’ view synthesis in challenging scenes.
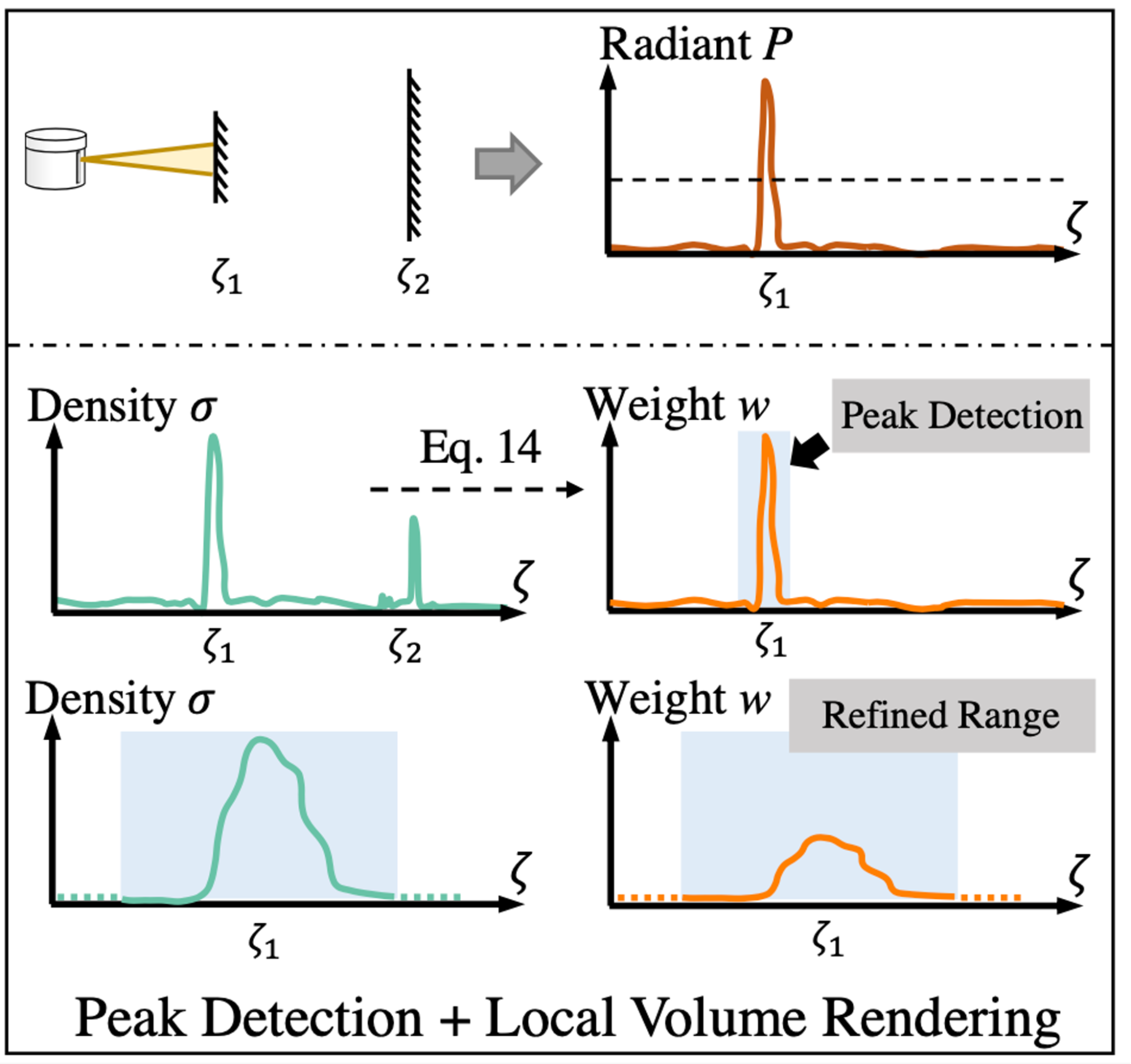
In Figure 2, the neural lidar fields accurately reproduce the waveform properties. The top row shows that the first surface fully scatters the lidar energy. The other rows shows that neural lidar fields estimate range through peak detection on the computed weights followed by volume rendering-based range refinement.
Results
Using these evaluation methods, we compared neural lidar field-synthesized lidar views with traditional reconstruction processes.
By accounting for real-world lidar characteristics, neural lidar field views reduced range errors and improved performance compared with explicit reconstruction. We also found the implicit method synthesized challenging scenes with high accuracy.
After we established performance, we then validated the neural lidar field-generated scans using two low-level perception tasks: point cloud registration and semantic segmentation.
We applied the same model to both real-world lidar scans and various synthesized scans to evaluate how well the scans maintained accuracy. We found that neural lidar fields outperformed the baseline methods on datasets with complex geometry and high noise levels.
For semantic segmentation, we applied the same pretrained model to both real and synthetic lidar scans. Neural lidar fields achieved the highest recall for vehicles, which are especially difficult to render due to sensor noise such as dual returns and ray drops.
While neural lidar fields are still an active research method, it is a critical tool for scalable AV simulation. Next, we plan to focus on generalizing the networks across scenes and handling dynamic environments. Eventually, developers on Omniverse and the NVIDIA DRIVE Sim AV simulator will be able to tap into these AI-powered approaches for accelerated and physically based simulation.
For more information about neural lidar fields and our development and evaluation methods, see the Neural LiDAR Fields for Novel View Synthesis paper.
Acknowledgments
We would like to thank our collaborators at ETH Zurich, Shengyu Huang and Konrad Schindler, as well as Zan Gojcic, Zian Wang, Francis Williams, Yoni Kasten, Sanja Fidler, and Or Litany from the NVIDIA Research team.
