
범용 로봇 정책은 다양한 작업, 로봇 본체, 그리고 환경 전반에서 작동해야 하므로 확장 가능하고 반복 가능한 시뮬레이션 기반 평가가 필수적입니다. 하지만 대규모 정책 평가 환경을 구축하는 과정은 지루하고 수동적인 작업이 많습니다. 체계적인 접근 방식이 없다면 개발자는 막대한 오버헤드를 감수하며 커스텀 인프라를 직접 구축해야 하는 부담을 안게되며 이러한 방식으로는 작업 라이브러리의 복잡성과 다양성을 확보하는 데 한계가 따를 수밖에 없습니다.
본 포스팅에서는 시뮬레이션 내에서 효율적이고 확장 가능한 로봇 정책 평가를 위한 오픈 소스 프레임워크인 NVIDIA Isaac Lab-Arena를 소개합니다. Lightwheel과 공동 개발하고 NVIDIA Isaac Lab의 확장 기능으로 구현된 이 프레임워크는 작업 큐레이션, 다양화, 대규모 병렬 평가를 위한 간소화된 API를 제공합니다. 이제 개발자들은 시스템 구축에 드는 오버헤드 없이 복잡한 벤치마크의 프로토타입을 제작할 수 있습니다. 또한 환경 설정, 선택적인 정책 사후 학습, 그리고 폐루프 평가를 아우르는 엔드투엔드 샘플 워크플로우도 함께 제시합니다.
Isaac Lab-Arena의 개요 및 주요 장점
NVIDIA는 Isaac Lab-Arena의 프리 알파 버전을 공개하며, 커뮤니티와 함께 향후 로드맵을 그려나가고자 합니다. 또한 벤치마크 개발자들과 협력하여 그들의 평가 모델을 Isaac Lab-Arena에서 구현하고 오픈 소스화함으로써, 통일된 코어를 기반으로 즉시 활용 가능한 벤치마크와 평가 방법론이 공유되는 생태계를 구축하고 있습니다.
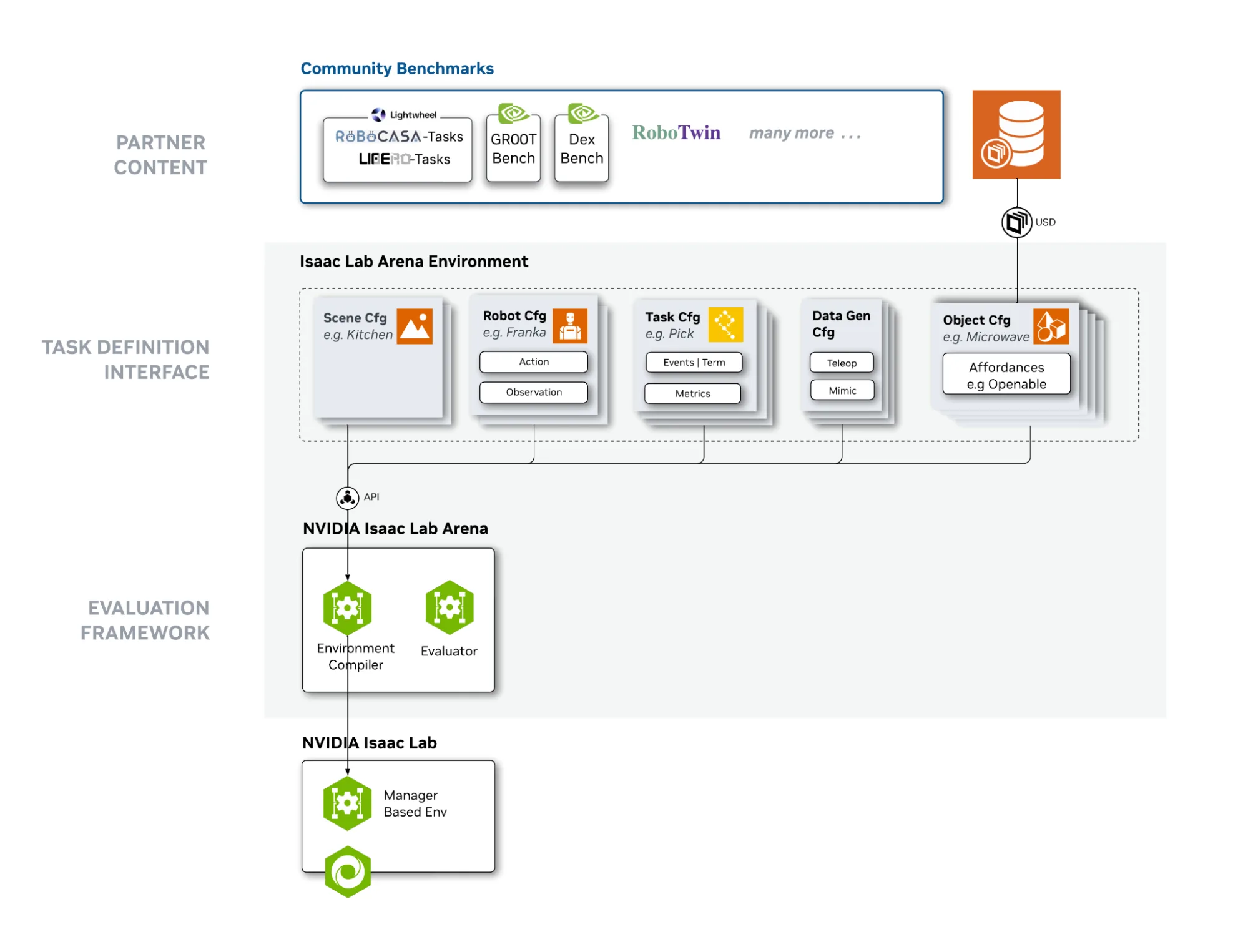
Isaac Lab-Arena의 주요 장점은 아래에 상세히 설명된 바와 같이 단순화된 작업 큐레이션, 자동화된 다양성 확보, 대규모 벤치마킹, 그리고 데이터 생성 및 학습과의 원활한 통합 등을 포함합니다.
- 단순화된 작업 큐레이션 (0에서 1로):
- 모듈화: 단일 구조의 작업 설명을 레고와 같은 아키텍처로 대체하여 객체, 장면, 로봇 본체, 작업(Task) 블록으로부터 Isaac Lab 환경을 즉석에서 컴파일합니다.
- 일반화 가능성: 어포던스 시스템(예: 열 수 있음, 누를 수 있음)을 통한 표준화된 상호작용을 통해 다양한 객체에 걸쳐 작업을 확장할 수 있습니다.
- 확장성: 기록되는 지표와 데이터는 확장이 가능하여, 필요에 따라 시뮬레이션 및 분석에 대해 세밀한 제어가 가능합니다.
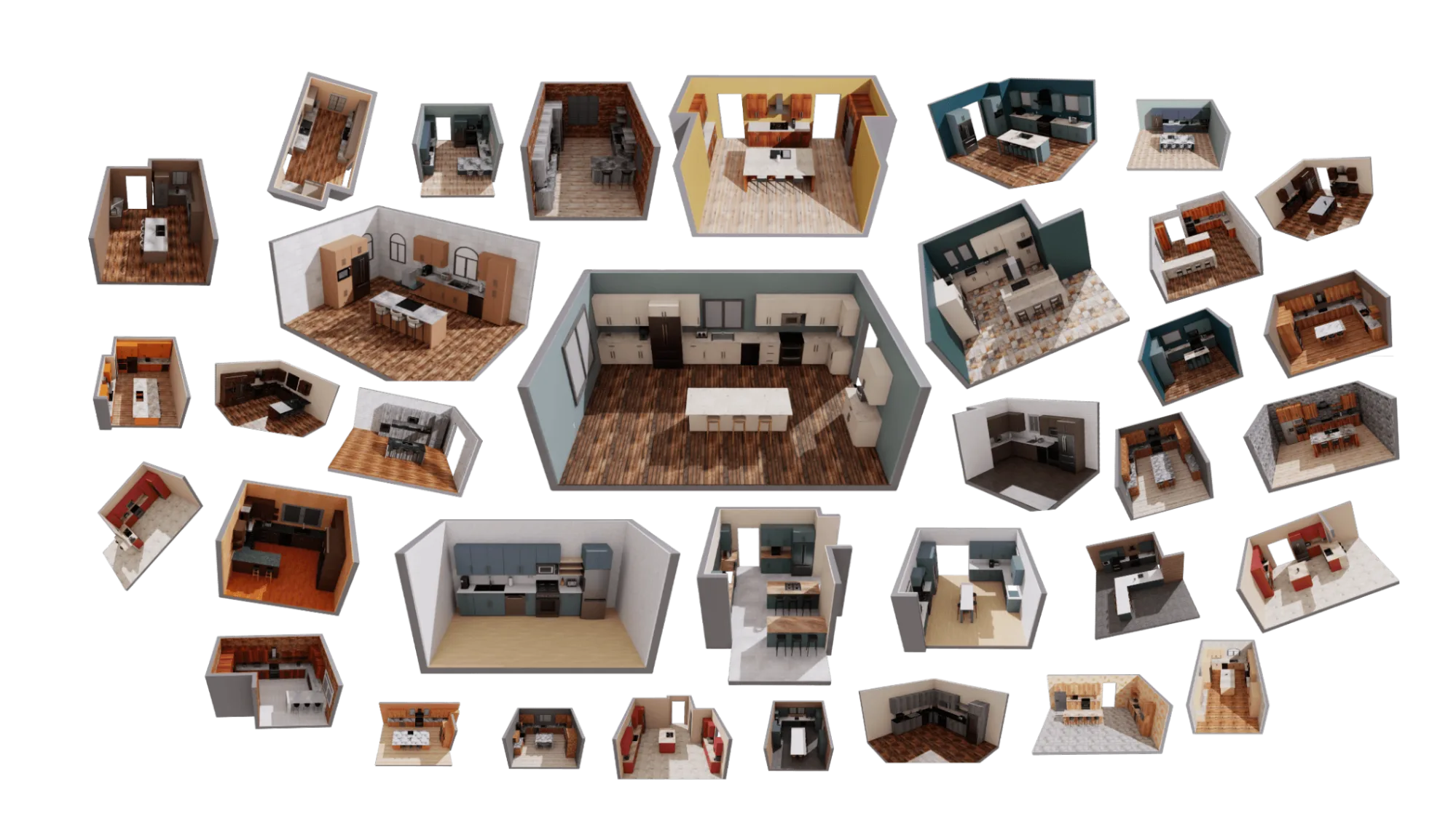
- 자동화된 다양성 확보 (1에서 다수로): 코드를 재작성하지 않고도 구성 요소를 쉽게 믹스 앤 매치하여 하나의 작업을 서로 다른 로봇이나 객체에 적용할 수 있습니다(예: 가정용 음료수 캔 작업에서 산업용 파이프 작업으로 전환). 향후 개발 팀은 파운데이션 모델을 활용하여 다양하고 현실적인 작업을 자동으로 생성하는 것을 목표로 하고 있습니다.
- 대규모 병렬 및 정책 불가지론적(Policy-agnostic) 벤치마킹: 고처리량의 GPU 가속 평가를 위해 수천 개의 병렬 환경에서 모든 로봇 정책을 평가할 수 있습니다. 현재 버전은 매개변수 변동이 있는 균질 병렬 환경을 지원합니다.
- 커뮤니티 벤치마크 접근 및 공유: 통일된 코어 기반의 공유 평가 방법론을 활용할 수 있습니다.
- 상용 라이선스를 포함한 오픈 소스: 개발자는 프레임워크 개발에 자유롭게 참여하고 배포 및 기여할 수 있습니다.
- 데이터 생성 및 학습과의 원활한 통합: Isaac Lab-Arena의 핵심 기능은 작업 설정 및 평가이지만, 원활한 폐루프 워크플로우를 위해 데이터 생성 및 학습 프레임워크와 긴밀하게 통합됩니다. 여기에는 Isaac Lab-Teleop, Isaac Lab-Mimic, 그리고 NVIDIA Isaac GR00T N 모델의 사후 학습 및 추론이 포함됩니다.
- 유연한 배포: 로컬 워크스테이션이나 CI/CD를 위한 클라우드 네이티브 환경(예: OSMO)에 배포하거나, LeRobot Environment Hub와 같은 리더보드 및 배포 플랫폼에 통합할 수 있습니다.
생태계 발전
NVIDIA는 벤치마크 저자들과 협력하여 Isaac Lab-Arena를 기반으로 평가 시스템을 구축하고 있으며, 커뮤니티가 통일된 코어 위에서 재사용 및 확장할 수 있도록 Sim-to-Real 검증이 완료된 평가 방법, 작업, 데이터셋을 공개하고 있습니다. 지원 범위는 이동성, 조작, 그리고 이동-조작을 아우르는 산업 및 연구용 벤치마크를 모두 포함합니다.
Lightwheel은 Isaac Lab-Arena 프레임워크를 공동 개발하고 이를 채택하여 Lightwheel-RoboCasa-Tasks 및 Lightwheel-LIBERO-Tasks 스위트를 통해 250개 이상의 작업을 오픈 소스로 제공했으며, 향후 이들을 표준 벤치마크로 확립할 계획입니다. 또한 Lightwheel은 Isaac Lab-Arena를 사용하여 복잡한 실제 환경을 대변하는 산업용 벤치마크인 RoboFinals를 개발하고 있습니다.
Isaac Lab-Arena 환경은 이제 Hugging Face LeRobot Environment Hub에 통합되었습니다. 개발자들은 Isaac Lab-Arena로 구축된 커스텀 환경을 원활하게 등록할 수 있으며, 확장 중인 환경 라이브러리를 활용해 Isaac GR00T N, pi0, SmolVLA를 포함한 로봇 정책의 사후 학습 및 평가를 수행할 수 있습니다. 자세한 내용은 LeRobot 기술 문서를 참조하세요.
NVIDIA는 Hugging Face를 통해 수백만 명의 개발자에게 오픈 로봇 모델과 데이터셋을 제공하고 있으며, 이는 로봇 공학이 해당 플랫폼에서 가장 빠르게 성장하는 카테고리가 되는 데 기여하고 있습니다.
RoboTwin은 Isaac Lab-Arena를 활용해 대규모 피지컬 AI 시뮬레이션 벤치마크인 RoboTwin 2.0의 확장 버전과 기타 복잡한 장기 작업 벤치마크를 구축하고 있습니다. 오픈 소스 릴리스가 계획되어 있으며, 연구 논문 제출 및 코드 업데이트를 위한 활발한 개발이 진행 중입니다.
또한 GEAR(Generalist Embodied Agent Research) 연구소와 같은 NVIDIA 리서치 랩에서는 Isaac Lab-Arena를 활용하여 대규모 범용 휴머노이드 추론 및 기술을 위한 Isaac GR00T N 계열 시각-언어-행동 모델의 성능을 측정하고 있습니다.
NVIDIA Seattle Robotics Lab(SRL)은 언어 조건부 작업 스위트 및 범용 로봇 정책 벤치마킹을 위한 평가 방법론에 대한 연구 결과를 Isaac Lab-Arena에 통합하고 있습니다.
Isaac Lab-Arena의 향후 개선 사항
이번 프리 알파 버전은 의도적으로 핵심 골격만 갖춘 초기 프레임워크 형태로 공개되었습니다. 이는 개발자들이 직접 실험하며 피드백을 공유하고, 향후 설계와 발전 방향에 실질적인 영향력을 발휘할 수 있는 토대를 마련하기 위함입니다.
머지않아 복잡한 작업 라이브러리 구축에 필수적인 핵심 기능들이 추가될 예정입니다. 여기에는 자연어를 활용한 객체 배치, 원자적 기술을 조합한 복합 작업 구성, 강화학습 환경 설정, 그리고 병렬 환경마다 각기 다른 객체를 배치하는 병렬 이기종 평가 기능 등이 포함됩니다.
한 단계 더 나아가, 개발 팀은 평가 규모를 대폭 확장하기 위해 더욱 에이전틱하고 신경망 중심적인 접근 방식을 도입할 계획입니다. 예를 들어, NVIDIA Cosmos를 활용한 월드 모델 기반 뉴럴 시뮬레이션 및 시나리오 생성, 실제 세계를 거울처럼 반영하는 시뮬레이션 환경 구축을 위한 NVIDIA Omniverse NuRec 기반의 Real-to-Sim 기술 등이 있습니다. 이러한 발전에는 커뮤니티의 참여와 피드백이 핵심적인 역할을 할 것입니다.
Isaac Lab-Arena를 사용한 대규모 작업 설정 및 정책 평가 방법
이 섹션에서는 Isaac Lab-Arena에서 GR1 로봇을 사용하여 조작 기술 중 하나인 ‘전자레인지 문 열기’에 대해 Isaac GR00T N 모델을 평가하는 엔드투엔드 샘플 워크플로우를 소개합니다. 이 과정은 환경 설정, 선택적 정책 사후 학습, 그리고 폐루프 평가를 포함합니다.
1단계: 환경 생성 및 다양화
GR1 전자레인지 문 열기 작업의 사전 요구 사항을 따라 리포지토리를 복제하고 Docker 컨테이너를 실행합니다. 그다음, Isaac Lab-Arena에서 객체(전자레인지)와 어포던스(열기 가능, 누르기 가능), 장면(주방), 로봇 본체(GR-1 로봇)를 결합하여 작업(문 열기)을 수행하는 환경을 생성합니다. 사용자는 선택적으로 원격 제어 기반의 데이터 수집 설정을 포함할 수 있습니다.
에셋 조달:
background = self.asset_registry.get_asset_by_name("kitchen")()
microwave = self.asset_registry.get_asset_by_name("microwave")()
assets = [background, microwave]
embodiment = self.asset_registry.get_asset_by_name("gr1_pink")(enable_cameras=args_cli.enable_cameras)
teleop_device = self.device_registry.get_device_by_name("avp")()
더 자세한 내용은 에셋 설계 및 어포던스 설계 문서를 참조하세요.
객체 배치:
microwave_pose = Pose(
position_xyz=(0.4, -0.00586, 0.22773),
rotation_wxyz=(0.7071068, 0, 0, -0.7071068),
)
microwave.set_initial_pose(microwave_pose)
장면 구성:
scene = Scene(assets=assets)
작업 생성:
task = OpenDoorTask(microwave, openness_threshold=0.8, reset_openness=0.2)
작업은 목표, 성공 기준과 더불어 종료 로직, 이벤트 및 지표를 캡슐화합니다. 자세한 내용은 작업 설계 문서를 확인하세요.
최종 조립: 마지막으로 모든 조각을 하나의 실행 가능한 완전한 환경으로 조립합니다.
isaaclab_arena_environment = IsaacLabArenaEnvironment(
name=self.name,
embodiment=embodiment,
scene=scene,
task=task,
teleop_device=teleop_device,
)
다음으로, 테스트 데이터셋을 사용하여 환경을 실행합니다.
테스트 데이터셋 다운로드:
hf download \
nvidia/Arena-GR1-Manipulation-Task \
arena_gr1_manipulation_dataset_generated.hdf5 \
--repo-type dataset \
--local-dir $DATASET_DIR
환경 실행:
python isaaclab_arena/scripts/replay_demos.py \
--device cpu \
--enable_cameras \
--dataset_file "${DATASET_DIR}/arena_gr1_manipulation_dataset_generated.hdf5" \
gr1_open_microwave \
--embodiment gr1_pink
로봇은 전자레인지를 열기 위해 NVIDIA가 수집한 원격 제어 데이터를 재현합니다.
새로운 환경을 만들기 위한 기술적 세부 사항과 설계 원칙은 튜토리얼 문서를 참고하세요.
로봇, 객체, 장면에 걸쳐 효율적으로 작업 확장하기
이 섹션에서는 환경이나 파이프라인을 재구축하지 않고도 작업 내의 객체나 로봇을 쉽게 수정하는 몇 가지 예시를 보여줍니다.
예시 1 – 객체를 전자레인지에서 power_drill로 변경
background = asset_registry.get_asset_by_name("kitchen")()
embodiment = asset_registry.get_asset_by_name("gr1_pink")()
power_drill = asset_registry.get_asset_by_name("power_drill")()
assets = [background, power_drill]

예시 2 – 로봇 본체를 GR1에서 Franka 암으로, 객체를 cracker_box로 변경:
background = asset_registry.get_asset_by_name("kitchen")()
embodiment = asset_registry.get_asset_by_name("franka")()
cracker_box = asset_registry.get_asset_by_name("cracker_box")()
assets = [background, cracker_box]

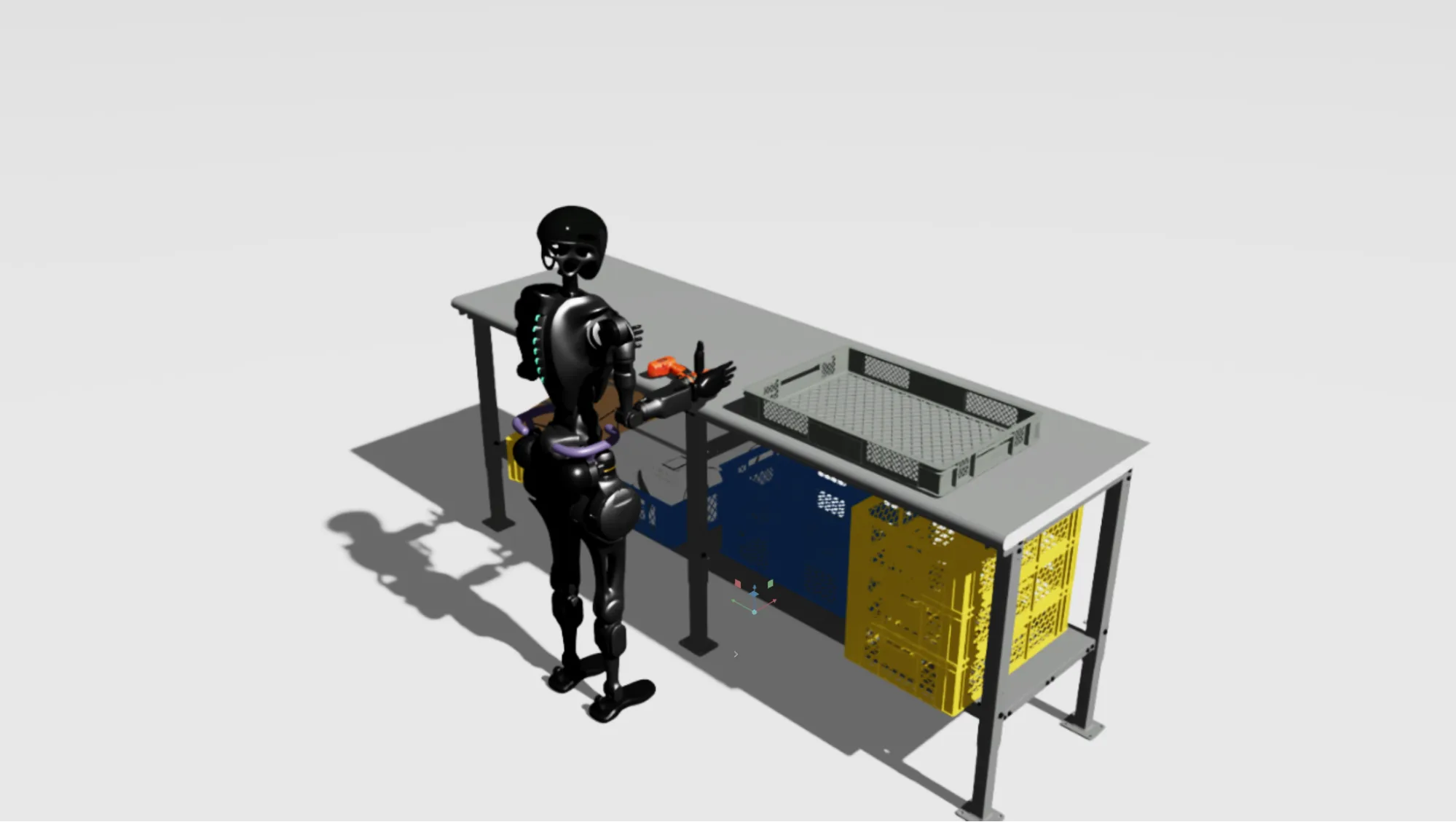
예시 3 – 배경을 주방에서 packing_table로 변경:
background = asset_registry.get_asset_by_name("packing_table")()
embodiment = asset_registry.get_asset_by_name("gr1_pink")()
cracker_box = asset_registry.get_asset_by_name("power_drill")()
assets = [background, cracker_box]
2단계: 선택적 정책 사후 학습
Isaac Lab-Arena의 핵심은 작업 설정과 정책 평가에 집중되어 있지만, 평가 전 정책의 사후 학습이 필요한 경우 데이터 수집, 데이터 생성 및 사후 학습 단계와 원활하게 상호 운용될 수 있습니다. 다음 기능을 활용할 수 있습니다.
- Isaac Lab Teleop을 사용하여 시연 데이터 수집
- Isaac Lab Mimic을 사용하여 시연 데이터를 더 큰 규모의 합성 데이터셋으로 확장
- 생성된 데이터셋을 사용하여 NVIDIA Isaac GR00T N 모델 또는 원하는 로봇 정책의 사후 학습 수행
3단계: 병렬 환경에서 평가 실행
다음 단계는 학습된 정책을 평가하는 과정입니다. 여기서 핵심은 이 프레임워크를 활용해 그 어떤 로봇 정책이라도 제약 없이 평가할 수 있다는 점입니다.
옵션 1 – 단일 환경에서 정책 테스트:
python isaaclab_arena/examples/policy_runner.py \
--policy_type gr00t_closedloop \
--policy_config_yaml_path isaaclab_arena_gr00t/gr1_manip_gr00t_closedloop_config.yaml \
--num_steps 2000 \
--enable_cameras \
gr1_open_microwave \
--embodiment gr1_joint
옵션 2 – 여러 개의 병렬 균질 환경에서 정책 테스트:
python isaaclab_arena/examples/policy_runner.py \
--policy_type gr00t_closedloop \
--policy_config_yaml_path isaaclab_arena_gr00t/gr1_manip_gr00t_closedloop_config.yaml \
--num_steps 2000 \
--num_envs 10 \
--enable_cameras \
gr1_open_microwave \
--embodiment gr1_joint
NVIDIA Isaac Lab-Arena 시작하기
Isaac Lab-Arena 프리 알파 버전은 오픈 소스로 공개되어 있으며, 커뮤니티와 함께 이 프레임워크의 향후 설계 및 발전 방향을 정의해 나가고자 합니다. Isaac Lab-Arena 프리 알파를 시작하려면 GitHub 리포지토리와 기술 문서를 방문해 보세요.
- 피드백 공유: 버그를 보고하거나 기능 및 설계 개선 사항을 제안하려면 GitHub Issue를 열어주세요. 또한 Pull Request를 통해 직접 변경 사항을 제안하며 기여할 수 있습니다.
- 벤치마크 구축: Isaac Lab-Arena에서 새로운 작업을 생성하거나 Sim-to-Real 검증이 완료된 벤치마크를 만들어 오픈 소스로 공개해 주세요. 이는 즉시 사용 가능한 로봇 학습 작업의 공유 생태계를 구축하는 데 큰 도움이 됩니다.
- 작업 게시: 제작한 작업을 LeRobot Environment Hub와 같은 리더보드나 평가 허브에 게시하여, 다른 개발자들이 쉽게 발견하고 공유 파이프라인 및 레지스트리에서 실행할 수 있도록 하세요.
뉴스레터를 구독하고 LinkedIn, Instagram, X, Facebook의 NVIDIA Robotics 채널을 팔로우하여 최신 소식을 받아보세요. NVIDIA 기술 문서와 YouTube 채널을 탐색하고, NVIDIA Developer Robotics 포럼에도 참여해 보시기 바랍니다. 로봇 공학 여정을 시작하고 싶다면 지금 바로 무료 NVIDIA Robotics Fundamentals 과정에 등록하세요.
피지컬 AI 시스템 개발을 위한 NVIDIA Isaac 라이브러리와 AI 모델을 지금 바로 활용해 보세요.
더 자세한 내용은 NVIDIA Live at CES 시청을 통해 확인하실 수 있습니다.




