Detailed Description
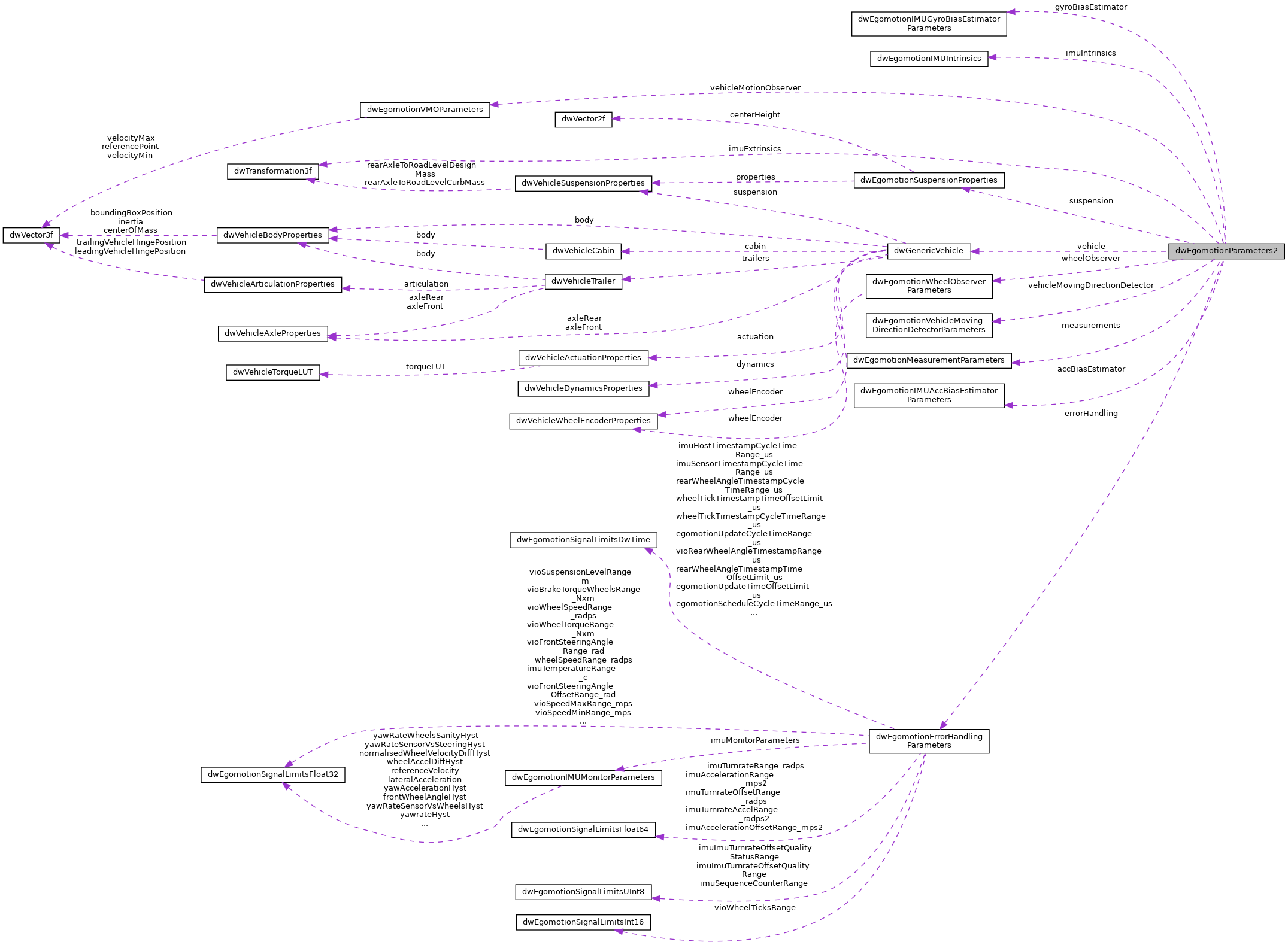
Egomotion parameters.
All parameters are required unless otherwise noted.
Definition at line 324 of file Egomotion2.h.
Data Fields | |
| dwGenericVehicle | vehicle |
| Vehicle parameters. More... | |
| dwEgomotionMeasurementParameters | measurements |
| Measurement parameters. More... | |
| dwTransformation3f | imuExtrinsics [DW_EGOMOTION_IMU_COUNT_MAX] |
| IMU extrinsics, transformation from IMU coordinate frame to vehicle rig coordinate frame. Order must match the imuSensorIndices. More... | |
| dwEgomotionIMUIntrinsics | imuIntrinsics [DW_EGOMOTION_IMU_COUNT_MAX] |
| IMU intrinsics. Leave 0 initialized if unknown. Order must match the imuSensorIndices. More... | |
| size_t | imuCount |
| Number of IMUs used simultaneously, in range [1, DW_EGOMOTION_IMU_COUNT_MAX]. More... | |
| uint32_t | imuSensorIndices [DW_EGOMOTION_IMU_COUNT_MAX] |
| Sensor Ids of used IMU sensors. Order must match for all IMU parameter specification arrays. More... | |
| dwEgomotionSuspensionProperties | suspension |
| Suspension parameters. More... | |
| size_t | stateHistorySize |
| Number of state estimates to keep in the history (if 0 specified default of 1000 is used). More... | |
| dwEgomotionGroundSpeedMeasurementTypes | groundSpeedType |
| Indicates the source for ground speed. More... | |
| dwEgomotionWheelObserverParameters | wheelObserver |
| Wheel observer parameters. More... | |
| dwEgomotionVehicleMovingDirectionDetectorParameters | vehicleMovingDirectionDetector |
| Vehicle moving direction detector parameters. More... | |
| dwEgomotionVMOParameters | vehicleMotionObserver |
| Vehicle motion observer parameters. More... | |
| dwEgomotionErrorHandlingParameters | errorHandling |
| Error handling parameters. More... | |
| dwEgomotionIMUAccBiasEstimatorParameters | accBiasEstimator |
| IMU accelerometer bias estimator parameters. More... | |
| dwEgomotionIMUGyroBiasEstimatorParameters | gyroBiasEstimator |
| IMU gyroscope bias estimator parameters. More... | |
| bool | automaticUpdate |
| Automatically update state estimation. More... | |
| bool | enableSuspensionSensorsUsage |
| Enable usage of suspension sensor signals. More... | |
Field Documentation
◆ accBiasEstimator
| dwEgomotionIMUAccBiasEstimatorParameters dwEgomotionParameters2::accBiasEstimator |
IMU accelerometer bias estimator parameters.
Definition at line 368 of file Egomotion2.h.
◆ automaticUpdate
| bool dwEgomotionParameters2::automaticUpdate |
Automatically update state estimation.
In general to update motion estimation, a call to dwEgomotion_update is required. When automaticUpdate is set, the motion estimation update is triggered by the addition of new IMU data.
- Note
- when the automatic update is active, dwEgomotion_update will not update the filter state and throw a
DW_NOT_SUPPORTEDexception instead.
Definition at line 378 of file Egomotion2.h.
◆ enableSuspensionSensorsUsage
| bool dwEgomotionParameters2::enableSuspensionSensorsUsage |
Enable usage of suspension sensor signals.
Definition at line 381 of file Egomotion2.h.
◆ errorHandling
| dwEgomotionErrorHandlingParameters dwEgomotionParameters2::errorHandling |
Error handling parameters.
Definition at line 365 of file Egomotion2.h.
◆ groundSpeedType
| dwEgomotionGroundSpeedMeasurementTypes dwEgomotionParameters2::groundSpeedType |
Indicates the source for ground speed.
Definition at line 351 of file Egomotion2.h.
◆ gyroBiasEstimator
| dwEgomotionIMUGyroBiasEstimatorParameters dwEgomotionParameters2::gyroBiasEstimator |
IMU gyroscope bias estimator parameters.
Definition at line 371 of file Egomotion2.h.
◆ imuCount
| size_t dwEgomotionParameters2::imuCount |
Number of IMUs used simultaneously, in range [1, DW_EGOMOTION_IMU_COUNT_MAX].
Definition at line 339 of file Egomotion2.h.
◆ imuExtrinsics
| dwTransformation3f dwEgomotionParameters2::imuExtrinsics[DW_EGOMOTION_IMU_COUNT_MAX] |
IMU extrinsics, transformation from IMU coordinate frame to vehicle rig coordinate frame. Order must match the imuSensorIndices.
Definition at line 333 of file Egomotion2.h.
◆ imuIntrinsics
| dwEgomotionIMUIntrinsics dwEgomotionParameters2::imuIntrinsics[DW_EGOMOTION_IMU_COUNT_MAX] |
IMU intrinsics. Leave 0 initialized if unknown. Order must match the imuSensorIndices.
Definition at line 336 of file Egomotion2.h.
◆ imuSensorIndices
| uint32_t dwEgomotionParameters2::imuSensorIndices[DW_EGOMOTION_IMU_COUNT_MAX] |
Sensor Ids of used IMU sensors. Order must match for all IMU parameter specification arrays.
Definition at line 342 of file Egomotion2.h.
◆ measurements
| dwEgomotionMeasurementParameters dwEgomotionParameters2::measurements |
Measurement parameters.
Definition at line 330 of file Egomotion2.h.
◆ stateHistorySize
| size_t dwEgomotionParameters2::stateHistorySize |
Number of state estimates to keep in the history (if 0 specified default of 1000 is used).
Definition at line 348 of file Egomotion2.h.
◆ suspension
| dwEgomotionSuspensionProperties dwEgomotionParameters2::suspension |
Suspension parameters.
Definition at line 345 of file Egomotion2.h.
◆ vehicle
| dwGenericVehicle dwEgomotionParameters2::vehicle |
Vehicle parameters.
Definition at line 327 of file Egomotion2.h.
◆ vehicleMotionObserver
| dwEgomotionVMOParameters dwEgomotionParameters2::vehicleMotionObserver |
Vehicle motion observer parameters.
Definition at line 362 of file Egomotion2.h.
◆ vehicleMovingDirectionDetector
| dwEgomotionVehicleMovingDirectionDetectorParameters dwEgomotionParameters2::vehicleMovingDirectionDetector |
Vehicle moving direction detector parameters.
Unused if
- Parameters
-
groundSpeedType is FROM_LINEAR_SPEED.
Definition at line 359 of file Egomotion2.h.
◆ wheelObserver
| dwEgomotionWheelObserverParameters dwEgomotionParameters2::wheelObserver |
Wheel observer parameters.
Unused if
- Parameters
-
groundSpeedType is not FROM_WHEEL_TICKS_AND_SPEEDS.
Definition at line 355 of file Egomotion2.h.
The documentation for this struct was generated from the following file: