Detailed Description
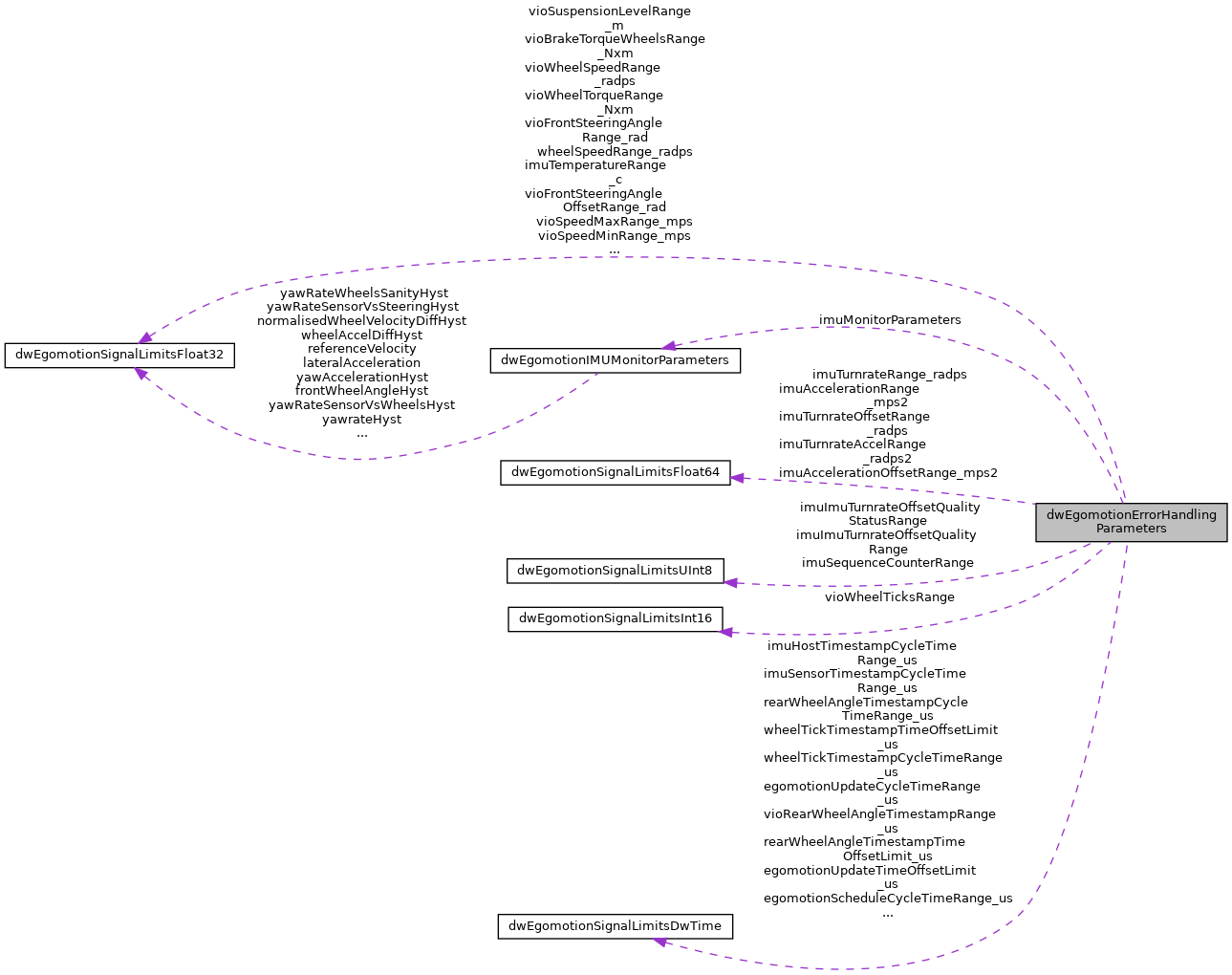
Parameters for error handling related logic.
Definition at line 167 of file ErrorHandlingParameters.h.
Field Documentation
◆ disabledErrorIdMask
| bool dwEgomotionErrorHandlingParameters::disabledErrorIdMask[DW_EGOMOTION_ERROR_ID_COUNT] |
Mask of disabled errors.
- See also
- getErrorIdDisableMask for how to generate this mask.
Definition at line 230 of file ErrorHandlingParameters.h.
◆ egomotionScheduleCycleTimeRange_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::egomotionScheduleCycleTimeRange_us |
Egomotion Schedule cycle time range (us)
Definition at line 328 of file ErrorHandlingParameters.h.
◆ egomotionUpdateCycleTimeRange_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::egomotionUpdateCycleTimeRange_us |
Egomotion Update cycle time range (us)
Definition at line 331 of file ErrorHandlingParameters.h.
◆ egomotionUpdateTimeOffsetLimit_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::egomotionUpdateTimeOffsetLimit_us |
Egomotion Update time offset limit (us)
Definition at line 334 of file ErrorHandlingParameters.h.
◆ enableDegradations
| bool dwEgomotionErrorHandlingParameters::enableDegradations |
Whether errors shall lead egomotion to degrade or go unavailable.
Error monitoring always runs in the background but is only acted upon if this parameter is set to true. Set the parameter to false if the vehicle platform does not comply with egomotion technical safety concept or if it is not yet stable enough. This might result in egomotion providing erroneous estimation.
Definition at line 182 of file ErrorHandlingParameters.h.
◆ enableInputDegradations
| bool dwEgomotionErrorHandlingParameters::enableInputDegradations |
Whether errors will cause bad input data to be ignored.
Definition at line 185 of file ErrorHandlingParameters.h.
◆ frontSteeringTimestampCycleTimeRange_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::frontSteeringTimestampCycleTimeRange_us |
Front Steering Timestamp cycle time range (us)
Definition at line 310 of file ErrorHandlingParameters.h.
◆ frontSteeringTimestampTimeOffsetLimit_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::frontSteeringTimestampTimeOffsetLimit_us |
Front Steering Timestamp time offset limit (us)
Definition at line 337 of file ErrorHandlingParameters.h.
◆ imuAccelerationOffsetRange_mps2
| dwEgomotionSignalLimitsFloat64 dwEgomotionErrorHandlingParameters::imuAccelerationOffsetRange_mps2 |
Acceleration Offset valid range (m/s²)
Definition at line 300 of file ErrorHandlingParameters.h.
◆ imuAccelerationRange_mps2
| dwEgomotionSignalLimitsFloat64 dwEgomotionErrorHandlingParameters::imuAccelerationRange_mps2 |
Acceleration valid range (m/s²)
Definition at line 297 of file ErrorHandlingParameters.h.
◆ imuHostTimestampCycleTimeRange_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::imuHostTimestampCycleTimeRange_us |
IMU Host Timestamp cycle time range (us)
Definition at line 325 of file ErrorHandlingParameters.h.
◆ imuHostTimestampRange_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::imuHostTimestampRange_us |
Host Timestamp valid range (us)
Definition at line 276 of file ErrorHandlingParameters.h.
◆ imuImuTurnrateOffsetQualityRange
| dwEgomotionSignalLimitsUInt8 dwEgomotionErrorHandlingParameters::imuImuTurnrateOffsetQualityRange |
Imu Turnrate Offset Quality valid range (unitless)
Definition at line 291 of file ErrorHandlingParameters.h.
◆ imuImuTurnrateOffsetQualityStatusRange
| dwEgomotionSignalLimitsUInt8 dwEgomotionErrorHandlingParameters::imuImuTurnrateOffsetQualityStatusRange |
Imu Turnrate Offset Quality Status valid range (unitless)
Definition at line 306 of file ErrorHandlingParameters.h.
◆ imuMonitorParameters
| dwEgomotionIMUMonitorParameters dwEgomotionErrorHandlingParameters::imuMonitorParameters |
IMU Monitor parameters.
Definition at line 373 of file ErrorHandlingParameters.h.
◆ imuSensorTimestampCycleTimeRange_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::imuSensorTimestampCycleTimeRange_us |
IMU Sensor Timestamp cycle time range (us)
Definition at line 322 of file ErrorHandlingParameters.h.
◆ imuSensorTimestampRange_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::imuSensorTimestampRange_us |
Sensor Timestamp valid range (us)
Definition at line 279 of file ErrorHandlingParameters.h.
◆ imuSequenceCounterRange
| dwEgomotionSignalLimitsUInt8 dwEgomotionErrorHandlingParameters::imuSequenceCounterRange |
Sequence Counter valid range (unitless)
Definition at line 282 of file ErrorHandlingParameters.h.
◆ imuTemperatureRange_c
| dwEgomotionSignalLimitsFloat32 dwEgomotionErrorHandlingParameters::imuTemperatureRange_c |
Temperature valid range (Celsius)
Definition at line 303 of file ErrorHandlingParameters.h.
◆ imuTimeout_us
| dwTime_t dwEgomotionErrorHandlingParameters::imuTimeout_us |
Time interval until absence of new IMU input results in timeout declared (us)
Definition at line 355 of file ErrorHandlingParameters.h.
◆ imuTimestampTimeOffsetLimit_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::imuTimestampTimeOffsetLimit_us |
IMU Timestamp time offset limit (us)
Definition at line 349 of file ErrorHandlingParameters.h.
◆ imuTurnrateAccelRange_radps2
| dwEgomotionSignalLimitsFloat64 dwEgomotionErrorHandlingParameters::imuTurnrateAccelRange_radps2 |
Turnrate Accel valid range (rad/s²)
Definition at line 294 of file ErrorHandlingParameters.h.
◆ imuTurnrateOffsetRange_radps
| dwEgomotionSignalLimitsFloat64 dwEgomotionErrorHandlingParameters::imuTurnrateOffsetRange_radps |
Turnrate Offset valid range (rad/s)
Definition at line 288 of file ErrorHandlingParameters.h.
◆ imuTurnrateRange_radps
| dwEgomotionSignalLimitsFloat64 dwEgomotionErrorHandlingParameters::imuTurnrateRange_radps |
Turnrate valid range (rad/s)
Definition at line 285 of file ErrorHandlingParameters.h.
◆ initializationChecksActive
| bool dwEgomotionErrorHandlingParameters::initializationChecksActive |
Definition at line 198 of file ErrorHandlingParameters.h.
◆ logCycles
| uint32_t dwEgomotionErrorHandlingParameters::logCycles |
Cycles between repeated logging of egomotion error states.
A cycle corresponds to an execution pass of the error monitoring logic, running on each addition of input data (VIO, IMU). A value of zero will result in no logging. A value of one will log errors every time they are detected. A higher value will result in subsampling of log messages.
Definition at line 195 of file ErrorHandlingParameters.h.
◆ logLevel
| dwLoggerVerbosity dwEgomotionErrorHandlingParameters::logLevel |
Verbosity level of logging.
Definition at line 188 of file ErrorHandlingParameters.h.
◆ maxAllowableGroundSpeedDeviation_mps
| float32_t dwEgomotionErrorHandlingParameters::maxAllowableGroundSpeedDeviation_mps |
Maximum allowable deviation between fastest and slowest linear wheel speed at ground (m/s)
Definition at line 364 of file ErrorHandlingParameters.h.
◆ maxAllowableGroundSpeedDeviation_percent
| float32_t dwEgomotionErrorHandlingParameters::maxAllowableGroundSpeedDeviation_percent |
Maximum allowable deviation between fastest and slowest linear wheel speed at ground (% of mean speed)
Definition at line 367 of file ErrorHandlingParameters.h.
◆ minGroundSpeedMonitorSpeed_mps
| float32_t dwEgomotionErrorHandlingParameters::minGroundSpeedMonitorSpeed_mps |
Minimum mean body speed at which ground speed monitor activates (m/s)
Definition at line 370 of file ErrorHandlingParameters.h.
◆ notifySEH
| bool dwEgomotionErrorHandlingParameters::notifySEH |
Whether errors should be notified to SEH.
Error monitoring always runs in the background but only notifies the system error handler if this parameter is set to true. Set the parameter to false if the vehicle platform does not comply with egomotion technical safety concept or if it is not yet stable enough.
Definition at line 174 of file ErrorHandlingParameters.h.
◆ rearWheelAngleTimestampCycleTimeRange_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::rearWheelAngleTimestampCycleTimeRange_us |
Rear Wheel Angle Timestamp cycle time range (us)
Definition at line 316 of file ErrorHandlingParameters.h.
◆ rearWheelAngleTimestampTimeOffsetLimit_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::rearWheelAngleTimestampTimeOffsetLimit_us |
Rear Wheel Angle Timestamp time offset limit (us)
Definition at line 343 of file ErrorHandlingParameters.h.
◆ sigPresenceFrontSteeringAngleControlQualityHigh
| bool dwEgomotionErrorHandlingParameters::sigPresenceFrontSteeringAngleControlQualityHigh |
Definition at line 219 of file ErrorHandlingParameters.h.
◆ sigPresenceFrontSteeringAngleHigh
| bool dwEgomotionErrorHandlingParameters::sigPresenceFrontSteeringAngleHigh |
Definition at line 218 of file ErrorHandlingParameters.h.
◆ sigPresenceFrontSteeringTimestampHigh
| bool dwEgomotionErrorHandlingParameters::sigPresenceFrontSteeringTimestampHigh |
Definition at line 220 of file ErrorHandlingParameters.h.
◆ sigPresenceIMUAccelerometerOffsetZ
| bool dwEgomotionErrorHandlingParameters::sigPresenceIMUAccelerometerOffsetZ |
Definition at line 224 of file ErrorHandlingParameters.h.
◆ sigPresenceIMUSequenceCounter
| bool dwEgomotionErrorHandlingParameters::sigPresenceIMUSequenceCounter |
Definition at line 226 of file ErrorHandlingParameters.h.
◆ sigPresenceIMUStatus
| bool dwEgomotionErrorHandlingParameters::sigPresenceIMUStatus |
Definition at line 225 of file ErrorHandlingParameters.h.
◆ sigPresenceIMUTimestampQuality
| bool dwEgomotionErrorHandlingParameters::sigPresenceIMUTimestampQuality |
Definition at line 223 of file ErrorHandlingParameters.h.
◆ sigPresenceIMUTurnrateOffsetQualityStatus
| bool dwEgomotionErrorHandlingParameters::sigPresenceIMUTurnrateOffsetQualityStatus |
Definition at line 227 of file ErrorHandlingParameters.h.
◆ sigPresenceRearWheelAngle
| bool dwEgomotionErrorHandlingParameters::sigPresenceRearWheelAngle |
Informs if the vehicle provides rear wheel angle signals.
Definition at line 201 of file ErrorHandlingParameters.h.
◆ sigPresenceRearWheelAngleQuality
| bool dwEgomotionErrorHandlingParameters::sigPresenceRearWheelAngleQuality |
Definition at line 202 of file ErrorHandlingParameters.h.
◆ sigPresenceRearWheelAngleTimestamp
| bool dwEgomotionErrorHandlingParameters::sigPresenceRearWheelAngleTimestamp |
Definition at line 203 of file ErrorHandlingParameters.h.
◆ sigPresenceRearWheelAngleTimestampQuality
| bool dwEgomotionErrorHandlingParameters::sigPresenceRearWheelAngleTimestampQuality |
Definition at line 204 of file ErrorHandlingParameters.h.
◆ sigPresenceSuspensionLevel
| bool dwEgomotionErrorHandlingParameters::sigPresenceSuspensionLevel |
Informs if the vehicle provides suspension level signals.
Definition at line 207 of file ErrorHandlingParameters.h.
◆ sigPresenceSuspensionLevelCalibrationState
| bool dwEgomotionErrorHandlingParameters::sigPresenceSuspensionLevelCalibrationState |
Definition at line 209 of file ErrorHandlingParameters.h.
◆ sigPresenceSuspensionLevelTimestamp
| bool dwEgomotionErrorHandlingParameters::sigPresenceSuspensionLevelTimestamp |
Definition at line 208 of file ErrorHandlingParameters.h.
◆ sigPresenceWheelSpeedQualityRedundant
| bool dwEgomotionErrorHandlingParameters::sigPresenceWheelSpeedQualityRedundant |
Definition at line 213 of file ErrorHandlingParameters.h.
◆ sigPresenceWheelSpeedRedundant
| bool dwEgomotionErrorHandlingParameters::sigPresenceWheelSpeedRedundant |
Informs if the vehicle provides redundant (High) signals.
Definition at line 212 of file ErrorHandlingParameters.h.
◆ sigPresenceWheelTicksDirectionRedundant
| bool dwEgomotionErrorHandlingParameters::sigPresenceWheelTicksDirectionRedundant |
Definition at line 215 of file ErrorHandlingParameters.h.
◆ sigPresenceWheelTicksRedundant
| bool dwEgomotionErrorHandlingParameters::sigPresenceWheelTicksRedundant |
Definition at line 214 of file ErrorHandlingParameters.h.
◆ sigPresenceWheelTicksTimestampQualityRedundant
| bool dwEgomotionErrorHandlingParameters::sigPresenceWheelTicksTimestampQualityRedundant |
Definition at line 217 of file ErrorHandlingParameters.h.
◆ sigPresenceWheelTicksTimestampRedundant
| bool dwEgomotionErrorHandlingParameters::sigPresenceWheelTicksTimestampRedundant |
Definition at line 216 of file ErrorHandlingParameters.h.
◆ suspensionLevelTimestampCycleTimeRange_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::suspensionLevelTimestampCycleTimeRange_us |
Suspension Level Timestamp cycle time range (us)
Definition at line 319 of file ErrorHandlingParameters.h.
◆ suspensionLevelTimestampTimeOffsetLimit_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::suspensionLevelTimestampTimeOffsetLimit_us |
Suspension Level Timestamp time offset limit (us)
Definition at line 346 of file ErrorHandlingParameters.h.
◆ vioBrakeTorqueWheelsRange_Nxm
| dwEgomotionSignalLimitsFloat32 dwEgomotionErrorHandlingParameters::vioBrakeTorqueWheelsRange_Nxm |
Brake Torque Wheels valid range (N*m)
Definition at line 267 of file ErrorHandlingParameters.h.
◆ vioFrontSteeringAngleOffsetRange_rad
| dwEgomotionSignalLimitsFloat32 dwEgomotionErrorHandlingParameters::vioFrontSteeringAngleOffsetRange_rad |
Front Steering Angle Offset valid range (rad)
Definition at line 246 of file ErrorHandlingParameters.h.
◆ vioFrontSteeringAngleRange_rad
| dwEgomotionSignalLimitsFloat32 dwEgomotionErrorHandlingParameters::vioFrontSteeringAngleRange_rad |
Front Steering Angle valid range (rad)
Definition at line 237 of file ErrorHandlingParameters.h.
◆ vioFrontSteeringTimestampRange_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::vioFrontSteeringTimestampRange_us |
Front Steering Timestamp valid range (us)
Definition at line 243 of file ErrorHandlingParameters.h.
◆ vioRearWheelAngleRange_rad
| dwEgomotionSignalLimitsFloat32 dwEgomotionErrorHandlingParameters::vioRearWheelAngleRange_rad |
Rear Wheel Angle valid range (rad)
Definition at line 240 of file ErrorHandlingParameters.h.
◆ vioRearWheelAngleTimestampRange_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::vioRearWheelAngleTimestampRange_us |
Rear Wheel Angle Timestamp valid range (us)
Definition at line 249 of file ErrorHandlingParameters.h.
◆ vioSpeedMaxRange_mps
| dwEgomotionSignalLimitsFloat32 dwEgomotionErrorHandlingParameters::vioSpeedMaxRange_mps |
Speed Max valid range (m/s)
Definition at line 264 of file ErrorHandlingParameters.h.
◆ vioSpeedMinRange_mps
| dwEgomotionSignalLimitsFloat32 dwEgomotionErrorHandlingParameters::vioSpeedMinRange_mps |
Speed Min valid range (m/s)
Definition at line 261 of file ErrorHandlingParameters.h.
◆ vioSuspensionLevelRange_m
| dwEgomotionSignalLimitsFloat32 dwEgomotionErrorHandlingParameters::vioSuspensionLevelRange_m |
Suspension Level valid range (m)
Definition at line 270 of file ErrorHandlingParameters.h.
◆ vioSuspensionLevelTimestampRange_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::vioSuspensionLevelTimestampRange_us |
Suspension Level Timestamp valid range (us)
Definition at line 273 of file ErrorHandlingParameters.h.
◆ vioTimeout_us
| dwTime_t dwEgomotionErrorHandlingParameters::vioTimeout_us |
Time interval until absence of new VIO input results in timeout declared (us)
Definition at line 352 of file ErrorHandlingParameters.h.
◆ vioWheelSpeedRange_radps
| dwEgomotionSignalLimitsFloat32 dwEgomotionErrorHandlingParameters::vioWheelSpeedRange_radps |
Wheel Speed valid range (rad/s)
Definition at line 234 of file ErrorHandlingParameters.h.
◆ vioWheelTicksRange
| dwEgomotionSignalLimitsInt16 dwEgomotionErrorHandlingParameters::vioWheelTicksRange |
Wheel Ticks valid range (unitless)
Definition at line 252 of file ErrorHandlingParameters.h.
◆ vioWheelTicksTimestampRange_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::vioWheelTicksTimestampRange_us |
Wheel Ticks Timestamp valid range (us)
Definition at line 255 of file ErrorHandlingParameters.h.
◆ vioWheelTorqueRange_Nxm
| dwEgomotionSignalLimitsFloat32 dwEgomotionErrorHandlingParameters::vioWheelTorqueRange_Nxm |
Wheel Torque valid range (N*m)
Definition at line 258 of file ErrorHandlingParameters.h.
◆ wheelRadius_m
| float32_t dwEgomotionErrorHandlingParameters::wheelRadius_m |
Nominal wheel radius in meters.
Definition at line 358 of file ErrorHandlingParameters.h.
◆ wheelSpeedRange_radps
| dwEgomotionSignalLimitsFloat32 dwEgomotionErrorHandlingParameters::wheelSpeedRange_radps |
Valid range for wheel speeds in rad/s.
Definition at line 361 of file ErrorHandlingParameters.h.
◆ wheelTickTimestampCycleTimeRange_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::wheelTickTimestampCycleTimeRange_us |
Wheel Tick Timestamp cycle time range (us)
Definition at line 313 of file ErrorHandlingParameters.h.
◆ wheelTickTimestampTimeOffsetLimit_us
| dwEgomotionSignalLimitsDwTime dwEgomotionErrorHandlingParameters::wheelTickTimestampTimeOffsetLimit_us |
Wheel Tick Timestamp time offset limit (us)
Definition at line 340 of file ErrorHandlingParameters.h.
The documentation for this struct was generated from the following file: