
Researchers from the Toyota Technological Institute at Chicago (TTIC) and Carnegie Mellon University developed a deep learning-based method that locates a ground vehicle by using satellite imagery as the only prior knowledge of the environment.
Knowing the exact location of a vehicle is critical for autonomous cars, and currently GPS systems are being used which the researchers claim suffer from limited precision and are sensitive to multipath effects – such as in “urban canyons” formed by tall buildings.
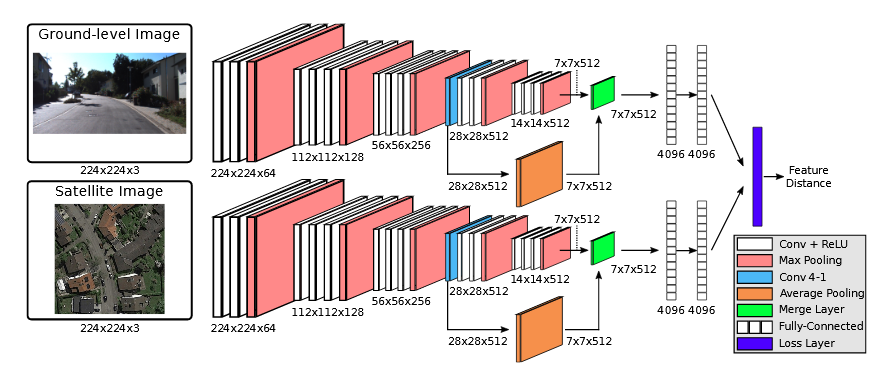
Using TITAN X GPUs, CUDA, and Keras with the Theano deep learning framework, the researchers multi-view neural network learns to match ground-level images with their corresponding satellite view. For training, they used ground-level images from the KITTI dataset collected from a moving vehicle and paired them with the matching satellite image.
The next step for the work is to adapt their model so it is able to tolerate more severe appearance variations like seasonal changes.
Read more >
AI-Generated Summary
- Researchers from the Toyota Technological Institute at Chicago (TTIC) and Carnegie Mellon University have developed a deep learning-based method to locate a ground vehicle using satellite imagery as prior knowledge of the environment.
- The method uses a multi-view neural network that matches ground-level images with their corresponding satellite view, trained on the KITTI dataset and implemented using TITAN X GPUs, CUDA, and Keras with the Theano deep learning framework.
- The researchers' next step is to adapt their model to tolerate more severe appearance variations, such as seasonal changes, indicating a future direction for improving the technology.
AI-generated content may summarize information incompletely. Verify important information. Learn more