Working on robotics is full of exciting and interesting problems but also days lost to humbling problems like sensor calibration, building transform trees, managing distributed systems, and debugging bizarre failures in brittle systems.
We built the BenchBot platform at QUT’s Centre for Robotics (QCR) to enable roboticists to focus their time on researching the exciting and interesting problems present in robotics.
We also recently upgraded to the new NVIDIA Omniverse-powered NVIDIA Isaac Sim, which has brought a raft of significant improvements to the BenchBot platform. Whether robotics is your hobby, academic pursuit, or job, BenchBot along with NVIDIA Isaac Sim capabilities enables you to jump into the wonderful world of robotics with only a few lines of Python. In this post, we share how we created BenchBot, what it enables, where we plan to take it in the future, and where you can take it in your own work. Our goal is to give you the tools to start working on your own robotics projects and research by presenting ideas about what you can do with BenchBot. We also share what we learned when integrating with the new NVIDIA Isaac Sim.
This post also supplies context for our Robotic Vision Scene Understanding (RVSU) challenge, currently in its third iteration. The RVSU challenge is a chance to get hands-on in trying to solve a fundamental problem for domestic robots: how can they understand what is in their environment, and where. By competing, you can win a share in prizes including NVIDIA A6000 GPUs and $2,500 USD cash.
The story behind BenchBot
BenchBot addressed a need in our semantic scene understanding research. We’d hosted an object detection challenge and produced novel evaluation metrics but needed to expand this work to the robotics domain:
- What is understanding a scene?
- How can the level of understanding be evaluated?
- What role does agency play in understanding a scene?
- Can understanding in simulation transfer to the real world?
- What’s required of a simulation for understanding to transfer to the real world?
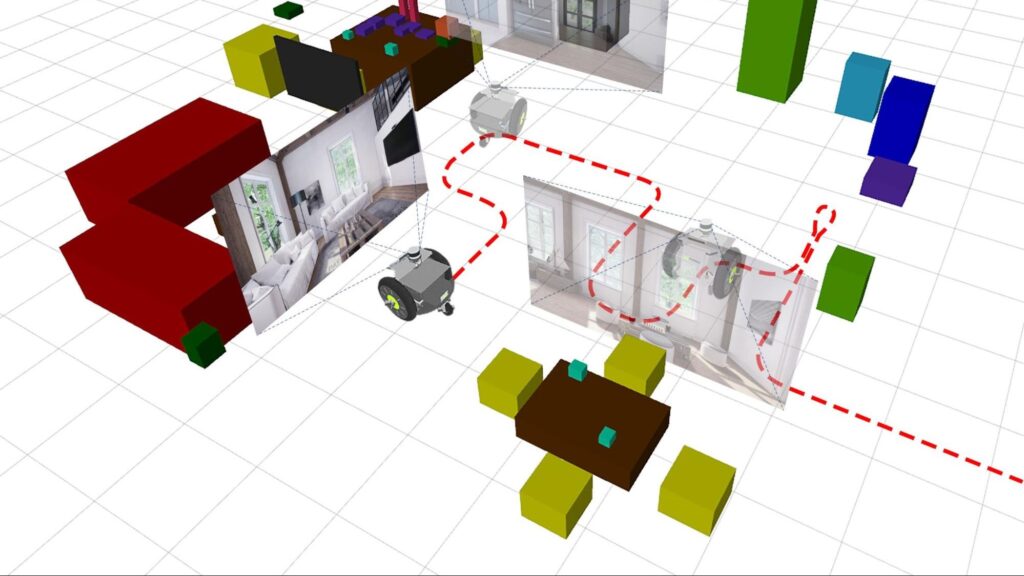
We made the BenchBot platform to enable you to focus on these big questions, without becoming lost in the sea of challenges typically thrown up by robotic systems. BenchBot consists of many moving parts that abstract these operational complexities away (Figure 2).
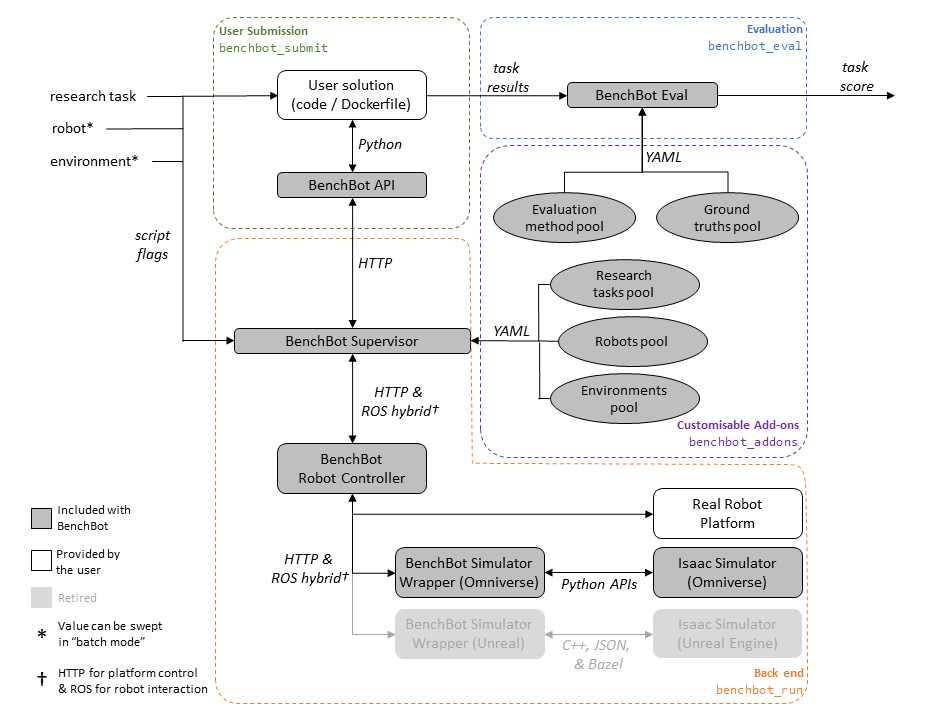
Here are some of the key components and features of the BenchBot architecture:
- You create solutions to robotics problems by writing a Python script that calls the BenchBot API.
- You can easily understand how well your solution performed a given robotics task using customisable evaluation tools.
- The supervisor brokers communications between the high-level Python API and low-level interfaces of typical robotic systems.
- The supervisor is backend-agnostic. The robot can be real or simulated, it just needs to be running ROS.
- All configurations live in a modular add-on system, allowing you to easily extend the system with your own tasks, robots, environments, evaluation methods, examples, and more.
All our code is open source under an MIT license. For more information, see BenchBot: Evaluating Robotics Research in Photorealistic 3D Simulation and on Real Robots (PDF).
A lot of moving parts isn’t necessarily a good thing if they complicate the user experience, so designing the user experience was also a central focus in developing BenchBot.
There are three basic commands for controlling the system:
benchbot_install --help benchbot_run --help benchbot_submit --help
The following command helps builds powerful evaluation workflows across multiple environments:
benchbot_batch --help
Here’s a simple Python command for interacting with the sensorimotor capabilities of a robot:
python
from benchbot_api import Agent, BenchBot
class MyAgent(Agent):
def is_done(self, action_result):
…
def pick_action(self, observations, action_list):
…
def save_result(self, filename, empty_results, results_format_fns):
…
BenchBot(agent=MyAgent()).run()
With a simple Python API, world-class photorealistic simulation, and only a handful of commands needed to manage the entire system, we were ready to apply BenchBot to our first big output: the RVSU challenge.
RVSU challenge
The RVSU challenge prompts researchers to develop robotic vision systems that understand both the semantic and geometric aspects of the surrounding environment. The challenge consists of six tasks, featuring multiple difficulty levels for object-based, semantic, simultaneous localization and mapping (SLAM) and scene change detection (SCD).
The challenge also focuses on a core requirement for household robots: they need to understand what objects are in their environment, and where they are. This problem in itself is the first challenge captured in our semantic SLAM tasks, where a robot must explore an environment, find all objects of interest, and add them to a 3D map.
The SCD task takes this a step further, asking a robot to report changes to the objects in the environment at a different point in time. My colleague David Hall presented an excellent overview of the challenge in the following video.
Bringing the RVSU challenge to life with NVIDIA Isaac Sim
Recently, we upgraded BenchBot from using the old Unreal Engine-based NVIDIA Isaac Sim to the new Omniverse-powered NVIDIA Isaac Sim. This brought a number of key benefits to BenchBot, leaving us excited about where we can go with Omniverse-powered simulations in the future. The areas in which we saw significant benefits included the following:
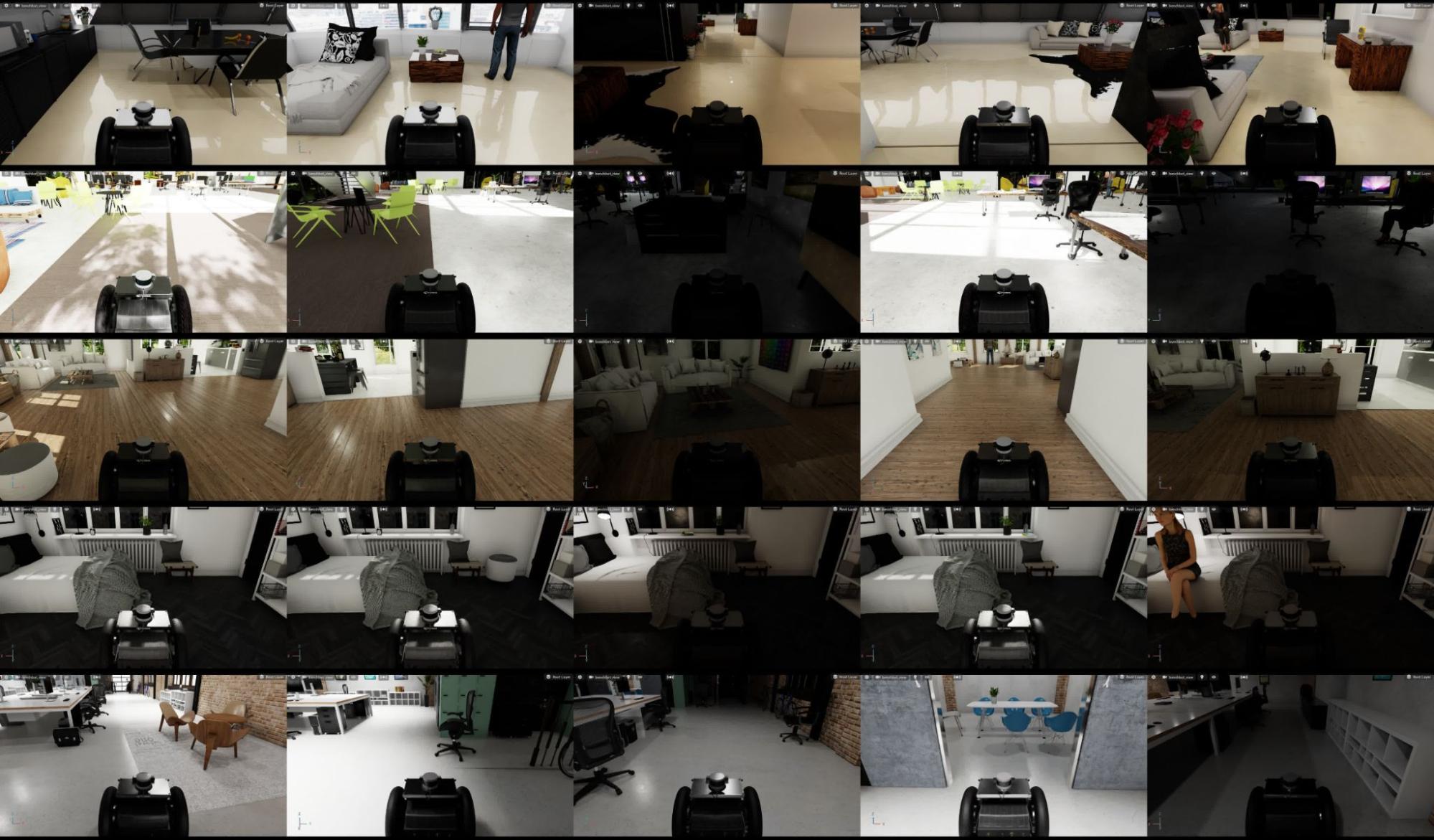
- Quality: NVIDIA RTX rendering produced beautiful photorealistic simulations, all with the same assets that we were using before.
- Performance: We accessed powerful dynamic lighting effects, with intricately mapped reflections, all produced in real-time for live simulation with realistic physics.
- Customizability: The Python APIs for Omniverse and NVIDIA Isaac Sim give complete control of the simulator, allowing us to restart simulations, swap out environments, and move robots programmatically.
- Simplicity: We replaced an entire library of C++ interfaces with a single Python file.
The qcr/benchbot_sim_omni repository captures our learnings in transitioning to the new NVIDIA Isaac Sim, and also works as a standalone package outside the BenchBot ecosystem. The package is a customizable HTTP API for loading environments, placing robots, and controlling simulations. It serves as a great starting point for programmatically running simulations with NVIDIA Isaac Sim.
We welcome pull requests and suggestions for how to expand the capabilities of this package. We also hope it can offer some useful examples for starting your own projects with NVIDIA Isaac Sim, such as the following examples.
Opening environments in NVIDIA Isaac Sim
Opening environments first requires a running simulator instance. A new instance is created by instantiating the SimulationApp class, with the open_usd option letting you pick an environment to open initially:
python
from omni.isaac.kit import SimulationApp
inst = SimulationApp({
"renderer": "RayTracedLighting",
"headless": False,
“open_usd”: MAP_USD_PATH,
})
It’s worth noting that only one simulation instance can run per Python script, and NVIDIA Isaac Sim components must be imported after initializing the instance.
Select a different stage at runtime by using helpers in the NVIDIA Isaac Sim API:
python from omni.isaac.core.utils.stage import open_stage, update_stage open_stage(usd_path=MAP_USD_PATH) update_stage()
Placing a robot in the environment
Before starting a simulation, load and place a robot in the environment. Do this with the Robot class and the following lines of code:
python from omni.isaac.core.robots import Robot from omni.isaac.core.utils.stage import add_reference_to_stage, update_stage add_reference_to_stage(usd_path=ROBOT_USD_PATH, prim_path=ROBOT_PRIM_PATH) robot = Robot(prim_path=ROBOT_PRIM_PATH, name=ROBOT_NAME) robot.set_world_pose(position=NP_XYZ * 100, orientation=NP_QUATERNION) update_stage()
Controlling the simulation
Simulations in NVIDIA Isaac Sim are controlled by the SimulationContext class:
python from omni.isaac.core import SimulationContext sim = SimulationContext() sim.play()
Then, the step method gives fine-grained control over the simulation, which runs at 60Hz. We used this control to manage our sensor publishing, transform trees, and state detection logic.
Another useful code example we stumbled upon was using the dynamic_control module to get the robot’s ground truth pose during a simulation:
python from omni.isaac.dynamic_control import _dynamic_control dc = _dynamic_control.acquire_dynamic_control_interface() robot_dc = dc.get_articulation_root_body(dc.get_object(ROBOT_PRIM_PATH)) gt_pose = dc.get_rigid_body_pose(robot_dc)
Results
Hopefully these code examples are helpful to you in getting started with NVIDIA Isaac Sim. With not much more than these, we’ve had some impressive results:
- A remarkable improvement in our photorealistic simulations
- Powerful real-time lighting effects
- Full customization through basic Python code
Figures 3, 4, and 5 show some of our favorite visual improvements from making the transition to Omniverse.



Taking it further: BenchBot in other domains
Although semantic scene understanding is a focal point of our research and the origins of its use in research, BenchBot’s applications aren’t limited solely to this domain. BenchBot is built using a rich add-on architecture allowing modular additions and adaptations of the system to different problem domains.
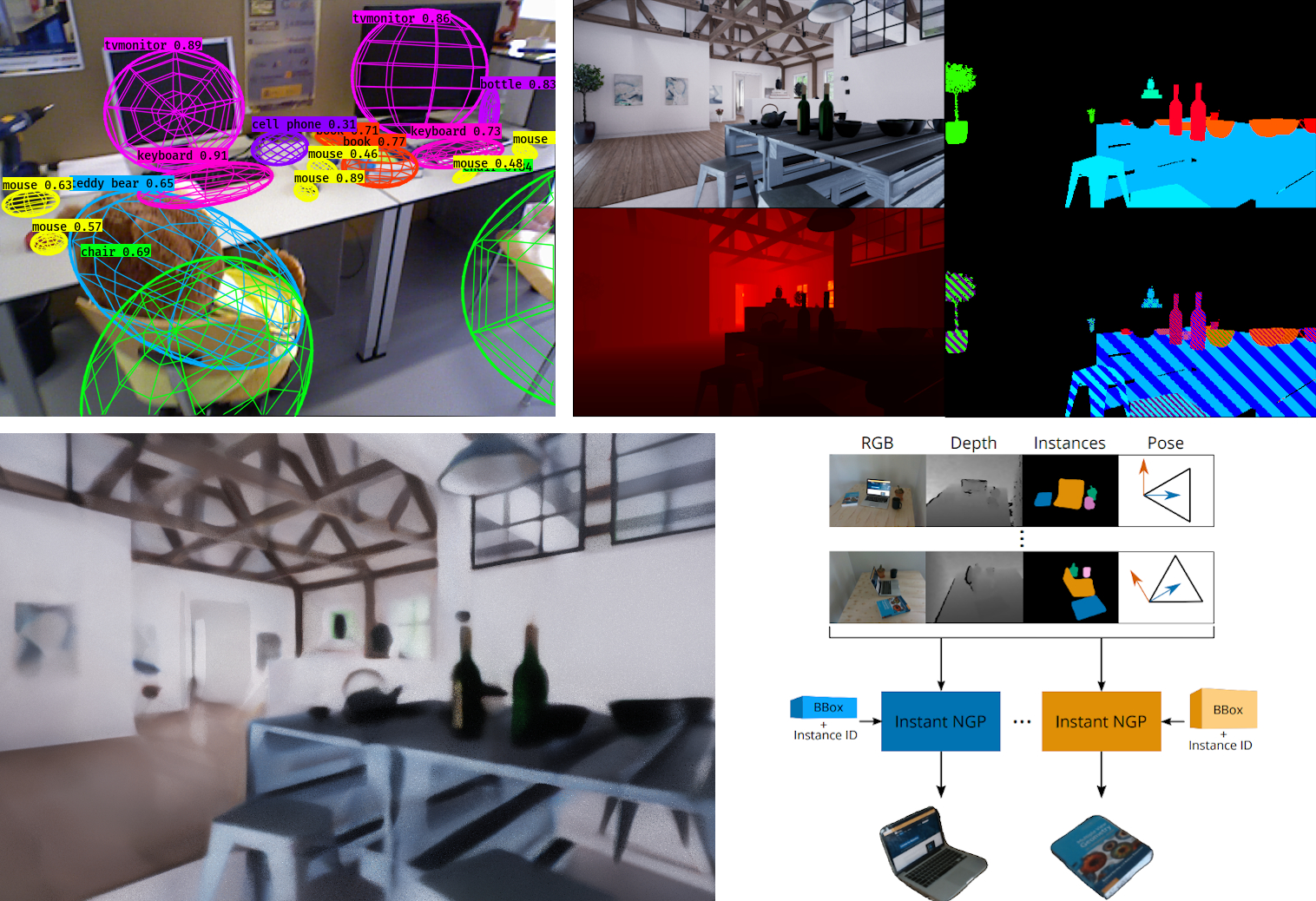
The visual learning and understanding research program at QCR has started using this flexibility to apply BenchBot and its Omniverse-powered simulations to a range of interesting problems. Figure 6 shows a few areas where we’re looking at employing BenchBot:
- Working towards using state-of-the-art semantic SLAM with QuadricSLAM, and our open-source GTSAM quadrics extension.
- Collecting synthetic datasets in Omniverse’s photorealistic simulations, using custom BenchBot add-ons.
- Exploring how neural radiance fields (NeRFs) can help enhance scene understanding and build better object maps with noisy data.
We’ve made BenchBot with a heavy focus on being able to fit it to your research problems. As much as we’re enjoying applying it to our research problems, we’re excited to see where others take it. Creating your own add-ons is documented in the add-ons repository, and we’d love to add some third-party add-ons to the official add-ons organization.
Conclusion
We hope this in-depth review has been insightful, and helps you step into robotics to work on the problems that excite us roboticists.
We welcome entries for the RVSU challenge, whether your interest in semantic scene understanding is casual or formal, academic or industrial, competitive or iterative. We think you’ll find competing in the challenge with the BenchBot system an enriching experience. You can register for the challenge, and submit entries through the EvalAI challenge page.
If you’re looking for where to go next with BenchBot and Omniverse, here are some suggestions:
- Follow our tutorial to get started with BenchBot.
- Create some custom add-ons and share them with the official BenchBot channel.
- Use the wrapping library to get started with programmatically running Omniverse and NVIDIA Isaac Sim.
- Contact BenchBot’s authors if you’ve got ideas for research collaboration or problems where you’d like to apply it.
At QCR, we’re excited to see where robotics is heading. With tools like BenchBot and the new Omniverse-powered NVIDIA Isaac Sim, there’s never been a better time to jump in and start playing with robotics.