Posts by David Hall
Robotics
May 26, 2022
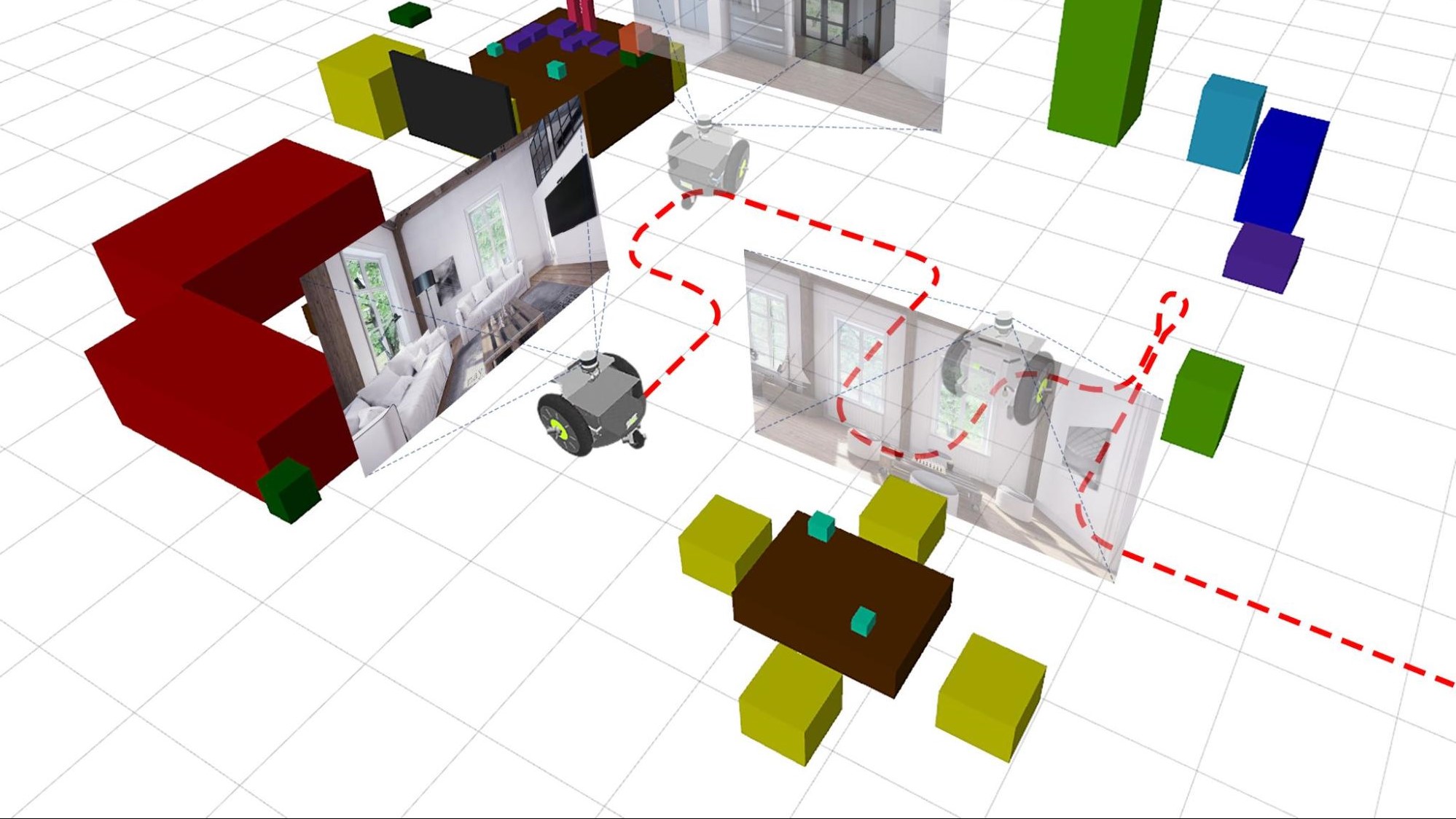
Making Robotics Easier with BenchBot and NVIDIA Isaac Sim
Working on robotics is full of exciting and interesting problems but also days lost to humbling problems like sensor calibration, building transform trees,...
11 MIN READ