
In work sponsored by Toyota, University of Michigan researchers developed a deep learning framework trained on GPUs to anticipate maneuvers of other highway vehicles up to three seconds into the future, such as performing left or right lane changes or staying in the same lane.
“In the event of sensor failure, it is necessary for autonomous vehicles to safely execute emergency maneuvers while avoiding other vehicles on the road,” mentioned the researchers in their related research paper, “In order to accomplish this, the sensor-failed vehicle must predict the future semantic behaviors of other drivers, such as lane changes, as well as their future trajectories given a small window of past sensor observations.”
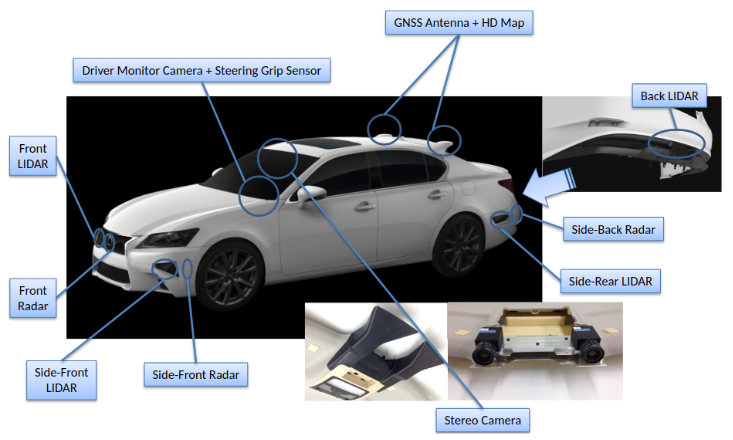
Using a cluster of GPUs and the cuDNN-accelerated TensorFlow deep learning framework, the team trained their recurrent neural networks (RNNs) on a data set of over 500,000 samples of highway driving using a Toyota sedan retrofitted with sensors of a typical automated vehicle. The team developed two different RNNs: one they call the ‘monolothic RNN’ which is used for the lane change prediction task and the other is a ‘composite RNN’ that transforms their graphical model into a Structural RNN to learn factor functions from data.
The next part of their research includes applying their method to city driving, such as predicting whether or not a vehicle will turn at an intersection.
Read more >
AI-Generated Summary
- Researchers from the University of Michigan developed a deep learning framework to predict the maneuvers of highway vehicles up to three seconds in the future using GPUs and the cuDNN-accelerated TensorFlow framework.
- The team trained their recurrent neural networks (RNNs) on a dataset of over 500,000 samples of highway driving collected using a Toyota sedan equipped with sensors, including a multi-LIDAR system and GPS.
- The researchers plan to apply their method to city driving scenarios, such as predicting whether a vehicle will turn at an intersection, in future work.
AI-generated content may summarize information incompletely. Verify important information. Learn more