Mar 25, 2026
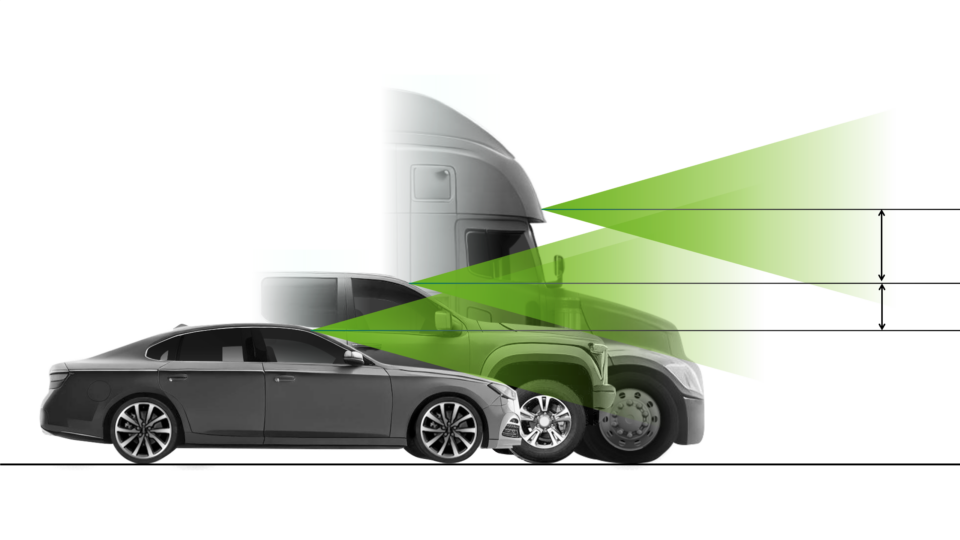
How Centralized Radar Processing on NVIDIA DRIVE Enables Safer, Smarter Level 4 Autonomy
In the current state of automotive radar, machine learning engineers can't work with camera-equivalent raw RGB images. Instead, they work with the output of...
11 MIN READ