Dan Jia, Alexander Hermans, and Bastian Leibe of RWTH Aachen University were awarded the Jetson Project of the Month for DR-SPAAM Detector. The Distance Robust Spatial Attention and Auto-regressive Model (DR-SPAAM), which runs on a Jetson AGX Xavier, is a deep learning model for detecting persons in 2D range sequences from a laser scanner.
Sensors such as RGB(-D) cameras and lidars or a combination of them are used in robotics applications such as factory co-working, human search and rescue, and health care to reliably detect persons in a given scene.
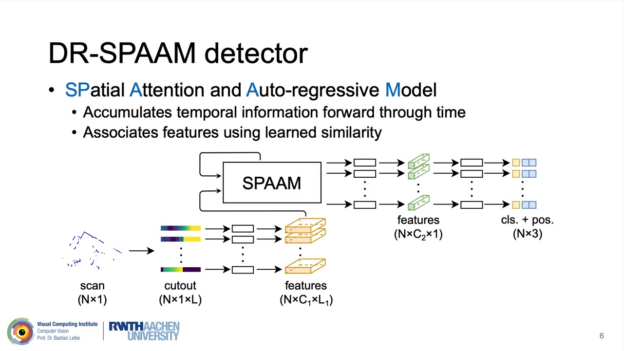
For this project, the team chose to use 2D lidars because of their large field of view and privacy-friendliness. To perform person detection, the detector keeps a representation based on the current measurements and recurrently updates the representation for each new available measurement.
This detector was evaluated using the DROW dataset, which contains 24,012 annotated scans split into training, validation and test sets. The detector outperformed the existing state-of-the-art implementations with higher detection accuracy and fast inference results at 87.2 FPS on a laptop with a NVIDIA GeForce RTX 2080 Max-Q GPU and 22.6 FPS on an NVIDIA Jetson AGX Xavier embedded GPU (~4X faster than the DROW detector).
DR-SPAAM scales to different lidar models and environments without need for extensive customization. For example, the team was able to deploy it on the Pepper robot from ETH Zurich (part of the Crowdbot initiative) without requiring re-training or fine-tuning.
The team has shared the PyTorch implementation, an example ROS node and pre-trained models here. They expect that this model will be useful for developers and researchers working on a range of robotics applications.
