
Programming robots for real-world success requires a training process that accounts for unpredictable conditions, different surfaces, variations in object size, shape, texture, and more. Consequently, physically accurate simulations are vital for training AI-enabled robots before deployment.
Crafting physically accurate simulation requires advanced programming skills to fine-tune algorithms, enabling robots to be trained in lifelike digital twins and tested across a wide variety of what-if scenarios that they may encounter. But even when organizations are able to build physics-based simulations, they are often so complex that only highly skilled robotics developers can use them.
NVIDIA Inception member and deep tech startup Wandelbots is making it easier for any roboticist to simulate robots in physics-based digital training environments, delivered through intuitive human-machine interfaces (HMI). Developers, system integrators, and automation engineers use Wandelbots to build their own application interface, connecting end users to the simulated environment. Factory planners can then interact with a robot cell on the shop floor and use the digital world to train the robot.
Wandelbots’ hardware-agnostic operating system, NOVA, seamlessly integrates with NVIDIA Isaac Sim, a robotics reference application built on top of NVIDIA Omniverse. Omniverse is a platform of APIs and SDKs for building workflows in Universal Scene Description (OpenUSD).
By enabling robot interaction and training in virtual worlds that mirror shop floor conditions, Wandelbots streamlines the transition from simulation to deployment, and enables AI-driven robotic use cases. Wandelbots provides out-of-the-box solutions, a downloadable software stack, APIs, and SDKs that enable you to run precise simulations through a low-code, intuitive interface and seamlessly deploy the final program onto physical robots.
Simplifying robot interactions with Omniverse
Wandelbots’ advanced robotics platform integrates with NVIDIA Isaac Sim through a custom extension. The Robotics Connector simplifies robot interaction through an intuitive low-code, browser-based user interface, enabling complex training and operational tasks for users with varying degrees of robotics expertise.
Wandelbots NOVA makes teaching robots new movements straightforward. You can streamline production processes by simulating tasks in virtual environments, optimizing workflows before commissioning tasks to the physical robots.
Precision simulation training
Wandelbots NOVA created an extensive library of annotated OpenUSD robot models from manufacturers such as FANUC, Yaskawa, Universal Robots, ABB, and KUKA that reflect the kinematics of real-world models to expedite robotic simulation workflows.
Wandelbots NOVA enables you to create a universal robot program that can include different robot manufacturers. This provides you with the opportunity to create a single robot program for complex automation tasks.
Using the “ghost teaching” method (Video 1), developers use a visual tool to manipulate a robot’s end effector or workpieces in simulation, teaching it how to move and pick up objects. This intuitive approach simplifies the programming of robot cells by providing a visual interface for positioning and movement, making it accessible even for those with minimal programming experience. With pose data from the simulation automatically transferred to the robot’s program, the need for complex coding is eliminated.
Immediate feedback enables users to see the real-time effects of their actions, facilitating quick adjustments and fine-tuning. Wandelbots also supports ongoing training with both synthetic and ground truth data, allowing for continuous training in simulated environments and reducing the need for on-site expert training for every new robot task.
Robot-agnostic unified programming interface
Wandelbots NOVA offers a universal programming interface consistent across all robot models. This enables users to program their robots the same way, regardless of the specific robot model they are using. It enables the users to switch robot models during the simulation phase without the need of making major adjustments to the robot program as a whole. You are also enabled to build your own robotic apps and HMI on top of Wandelbots NOVA. For example, you can build your own standardized sanding app.
The simple HMI also facilitates the creation of standardized cell setups, ensuring consistency and efficiency for users. With NOVA, you can teach robots various sanding paths, streamlining the process of programming complex tasks.

Figure 1. Universal programming interface from Wandelbots NOVA
Seamless transition between virtual and physical worlds
Wandelbots NOVA enables users to seamlessly transition between physical and virtual cell setups by connecting to the robot’s controller and streaming virtually planned motions to the robot.
This supports both greenfield and brownfield robotics system development:
- In greenfield systems, you can test new robot setups in an entirely virtual environment before any physical infrastructure is built.
- For brownfield systems, accurate simulations with ground truth data enables you to understand how new robots will interact with the existing infrastructure and make sure that they are compatible before deployment.
In either case, when the robot program is validated in simulation, the program can be transferred to physical robots using direct motion streaming, ensuring smooth operation and maximized productivity.
Wandelbots’ robotics connector enables direct communication between the physical robot and Isaac Sim, ensuring that robots in simulation operate synchronously with their physical counterparts. This facilitates real-time testing, validation, and troubleshooting, reducing development time and improving reliability.
Whether you are programming a robot in the real world or in a simulated environment, the process and interface remain the same. This consistency simplifies the programming process and also ensures that the skills and knowledge gained in one environment are directly transferable to the other.
Developing robotics systems with Isaac Sim
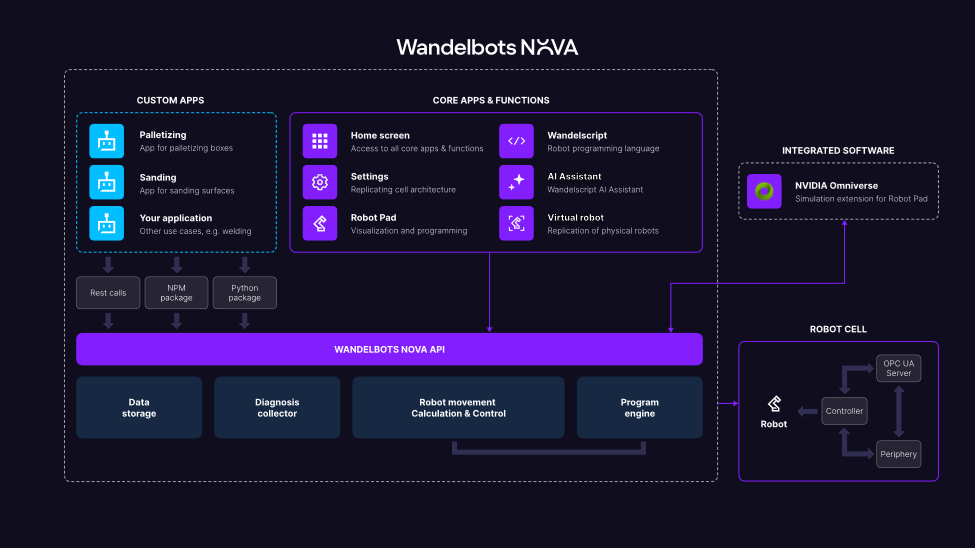
Figure 2. Wandelbots NOVA architecture
Wandelbots uses Isaac Sim to connect seamlessly to articulations through Web Sockets for real-time motion data exchange. Operators can control tools like surface grippers through robot controller IOs, with future support for the OPC Unified Architecture.
A German manufacturer of bouldering equipment, blocz, built an app based on Wandelbots NOVA that accompanies an abrasive cell using camera input to optimize motion for abrasive processes. To meet the demand of flexible and adaptive production, the app with Wandelbots NOVA enabled experts to remotely teach new models of workpieces, reducing the need for experts to appear onsite for each new workpiece.
Another example comes from a collaboration with an automotive parts manufacturer, where Wandelbots helped rearrange the setup and handover mechanisms between two robots. A test case showed that original robot cell cycle times could be improved by 50%.
To achieve this improved cycle time, a new cell setup was tested with Wandelbots NOVA. After the physical cell was set up according to the parameters of the simulated cell, only minor fine-tuning was needed for the final setup, resulting in a 90% accuracy of the simulated setup and faster time to installation for the customer.
The Wandelbots SaaS application is accessible through a web browser and provides immediate, cloud-hosted services. Downloadable software stacks enable on-premises deployment, ensuring data privacy and control.
With Wandelbots’ physics accurate simulations, your robotics programs can reduce development time and cost, and confidently go live with physical AI faster.
Getting started with Isaac Sim
You can build custom simulators or integrate Isaac Sim components into your existing workflows for more user-friendly robot training and interaction. For more information, see the following resources:
- NVIDIA Isaac Sim developer page
- Robotic Simulation Use Case
- Self-Paced Course: Introduction to Robotic Simulation in Isaac Sim
- Building Custom Robot Simulations feat Wandelbots livestream on Dec. 11, 2024
Discover how Wandelbots can help you plan your robotic application in Isaac Sim and bring simulations to life on the shop floor, by scheduling a meeting today.
Stay up to date by subscribing to the NVIDIA Robotics newsletter and following NVIDIA Robotics on YouTube, Discord, and the Isaac Sim developer forum.
