Start Building With Omniverse
NVIDIA Omniverse™ libraries, part of NVIDIA Agent Toolkit, include open-source and accelerated tools for agents and software developers to integrate prebuilt physical AI simulation capabilities into their applications and services. Agents can call on these capabilities as tools, while Omniverse skills help orchestrate agentic workflows across simulation pipelines.
Fastest ways to start:
Clone
Clone a GitHub repo for the library you want to evaluate.
Run
Run an agent skill for a defined workflow.
Start
Start from a blueprint for a complete physical AI workflow.
Use
Use docs and samples to connect Omniverse capabilities to your application.
Omniverse AI Agent Skills
Use NVIDIA-verified skills to guide bounded agent workflows for OpenUSD, simulation-ready asset prep, synthetic data, neural reconstruction, viewer creation, and scene optimization, with human review at the decision points.
CAD to SimReady
Convert CAD assets into SimReady USD with geometry, materials, and physics for downstream workflows.
Best for: Turning CAD or source assets into reviewable USD outputs for simulation pipelines
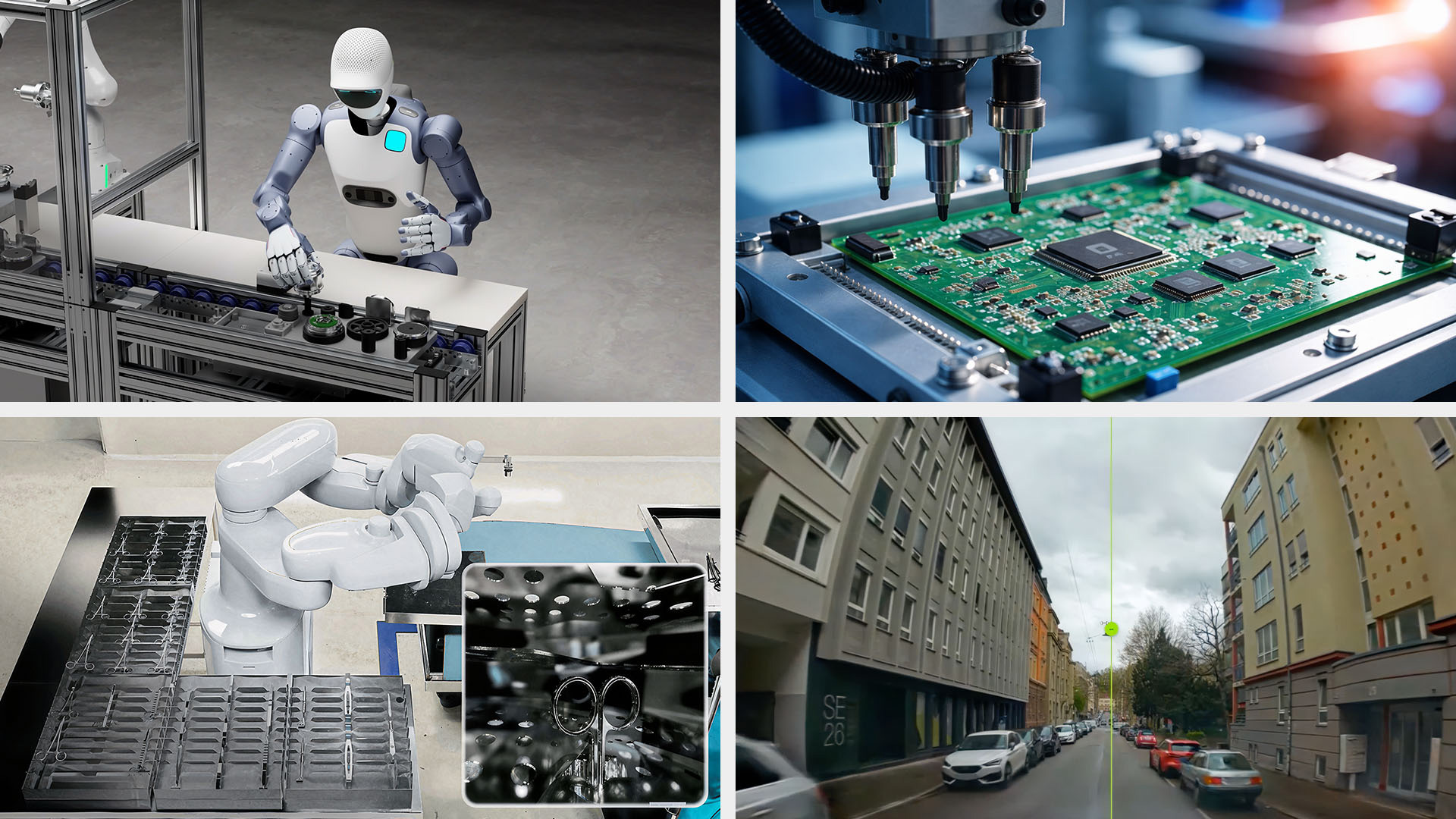
Defect Image Generation
Generate anomaly examples and evaluate models for AOI inspection use cases.
Best for: PCBA, metal surface, or glass inspection data workflows
Neural Reconstruction
Reconstruct real-world driving scenes and generate variations for AV training.
Best for: Camera, lidar, radar, or stereo reconstruction workflows for AV and robotics datasets
Realtime Viewer
Inspect OpenUSD scenes with a library-native viewer built from Omniverse tools.
Best for: Creating reviewable OpenUSD viewers without modifying source USD assets
Video Data Augmentation
Augment and enrich simulation data for training physical AI models.
Best for: Enriching and labeling video datasets for physical AI model development
USD Performance Tuning
Profile and tune large digital twin scenes for runtime simulation performance.
Best for: Diagnosing and improving large USD scenes before runtime or simulation use
Omniverse Tools for Agents
Build physical AI and simulation-ready workflows with libraries and services that agents can call, inspect, and report on while developers stay in control.
ovphysx
Open source, USD-native physics library for scalable robotics and digital twin simulation.
Best for: Loading USD scenes, stepping physics, cloning environments, and exchanging simulation data through tensors
ovrtx
GPU-accelerated rendering and sensor simulation libraries built on NVIDIA RTX™.
Best for: Adding visual and sensor preflight to 3D applications and simulation workflows
ovstage
Shared, GPU-capable scene data layer for high-performance simulation and visualization workflows.
Best for: Loading USD scene data once, sharing runtime state across Omniverse libraries, and exchanging simulation data through zero-copy tensors
ovstorage
Cloud-native APIs to manage, store, and synchronize OpenUSD asset data.
Best for: Giving tools or agents a consistent way to read, write, list, and route asset data across storage backends
ovstream
Streaming library for high-throughput, low-latency GPU data sharing.
Best for: Delivering rendered or interactive output from tools such as ovrtx to local or browser clients
ovui
Python UI library for app interfaces, interaction tests, and CI screenshot checks.
Best for: Creating local tools, inspectors, and review apps around USD workflows
SimReady Foundation
Framework and pipeline for creating and validating simulation-ready assets.
Best for: Understanding asset requirements, profiles, and validation targets for supported simulation workflows
simready-validate
Validate USD assets against SimReady specifications and profiles.
Best for: Checking whether assets meet a selected simulation-readiness profile before handoff
usd-agents
Use agents to assign physics, materials, and textures to USD assets.
Best for: Reviewable material, physics, texture, and validation workflows on USD assets
usd-search
Enable natural language search and reasoning across OpenUSD content.
Best for: Finding assets, prims, dependencies, or similar content across large USD libraries
usd-convert-asset
Convert common 3D asset formats to the interoperable OpenUSD format.
Best for: Scriptable asset ingestion into OpenUSD-based workflows
usd-convert-gsplat
Convert Gaussian splat data into OpenUSD for simulation and rendering.
Best for: Bringing .ply or .spz Gaussian splat data into OpenUSD workflows
mujoco-usd-converter
Convert MuJoCo models into OpenUSD for robotics simulation workflows.
Best for: Moving MuJoCo robot or simulation assets into OpenUSD for visualization, inspection, and targeted simulation workflows
urdf-usd-converter
Convert URDF robot assets into OpenUSD for robotics simulation.
Best for: Preparing URDF robots for OpenUSD review and Newton-oriented simulation workflows
usd-exchange
SDK for building interoperable OpenUSD data exchange workflows.
Best for: Developers mapping native application data into well-structured OpenUSD
usd-optimize
Optimize OpenUSD content for performance and memory.
Best for: Reducing scene complexity, memory use, or runtime cost in OpenUSD applications and pipelines
usd-validation-nvidia
Validate OpenUSD assets against NVIDIA and core USD checks.
Best for: Adding repeatable USD validation checks to local tools, CI, or agent-reviewed pipelines
OpenUSD
Open source framework and standard for interoperable 3D data, SimReady assets, and agentic workflows.
Best for: Building interoperable 3D data workflows that can support simulation-ready content and agent-reviewed pipelines
Simulation Libraries for Physical AI
These foundational simulation libraries power advanced physics, reconstruction, and AI modeling workflows. Use them directly when you need lower-level control, or through Omniverse tools and skills when building agentic physical AI workflows.
Newton Physics
An open source, extensible physics engine built on NVIDIA Warp and OpenUSD.
NuRec
APIs, libraries, and datasets for 3D Gaussian-based neural simulation from real-world data.
PhysX
Open source multi-physics SDK for scalable robotics simulation and modeling.
PhysicsNeMo
A CUDA-X™ library and open source Python framework for building, training, and fine-tuning AI physics models at scale.
NVIDIA Warp
Open source Python framework and CUDA-X library that delivers GPU acceleration for computational physics, AI, and optimization workflows.

Omniverse Labs
Explore experimental samples and reference patterns for building physical AI workflows with Omniverse libraries, OpenUSD, and agent-callable tools.
Explore Omniverse LabsGet Started With Blueprints and Agent Workflows
Start from reference workflows that show how Omniverse libraries, agent skills, and NVIDIA technologies come together for physical AI development.

DSX Gigawatt-Scale AI Factories
Optimize design, simulation, and operations of AI factories.
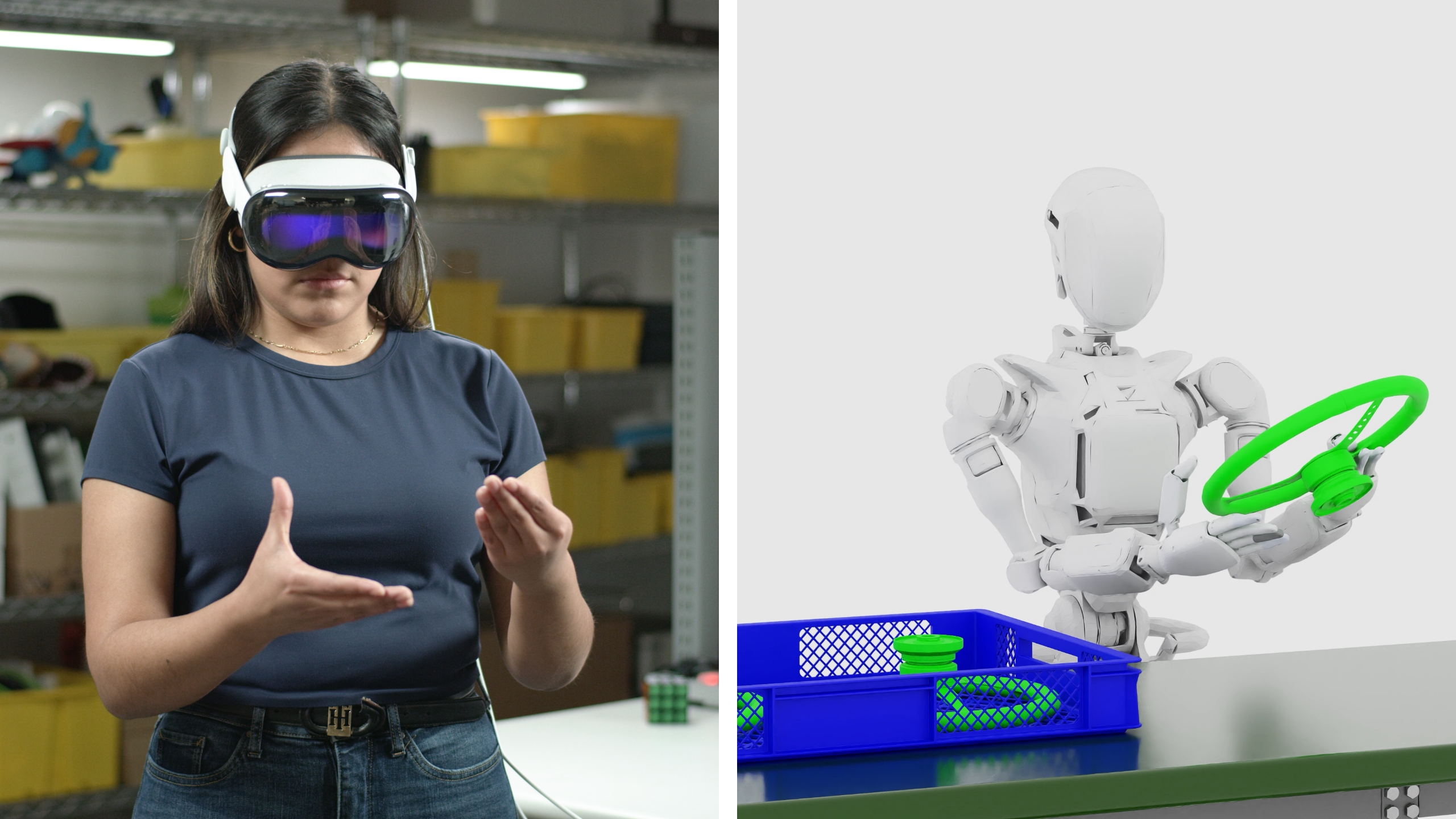
GR00T-Mimic Synthetic Robot Manipulation
Generate exponential synthetic manipulation data for robots.

Mega Multi-Robot Industrial Fleets
Simulate complex industrial robot fleets before real-world deployment.
Agent Skills for Synthetic Data Generation
Turn coding agents into synthetic data experts for physical AI development.

Digital Twin for Interactive Fluid Simulation
AI-powered virtual wind tunnel for real-time aerodynamic simulation and design.
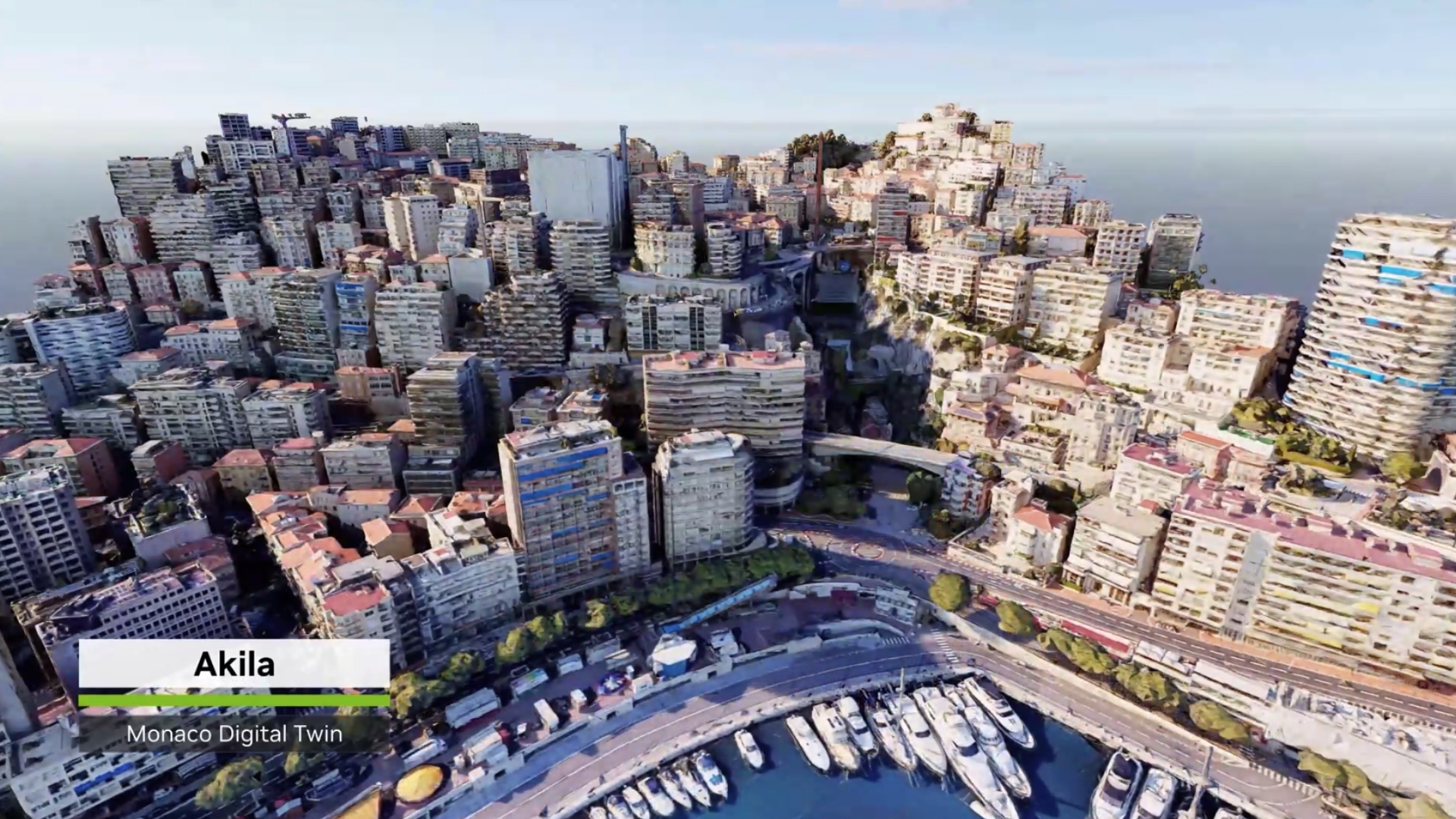
Digital Twins for Smart Cities
Build, test, and optimize visual AI agents in SimReady digital twins to monitor city-scale operations.