最近的研究表明,在语义分割和目标检测等计算机视觉任务中,大型 transformer 模型可以实现或提高 SOTA 。然而,与只能使用标准公共数据集的卷积网络模型不同,它需要一个更大的专有数据集。
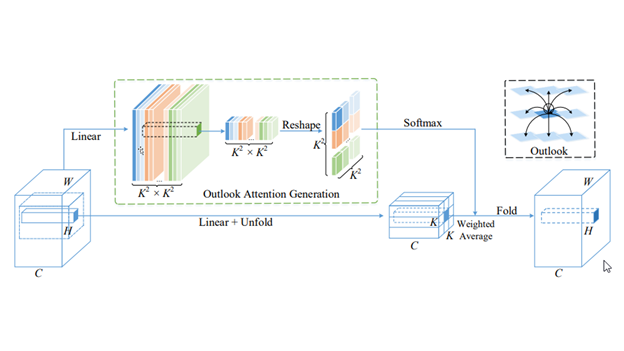
VOLO 模型体系结构
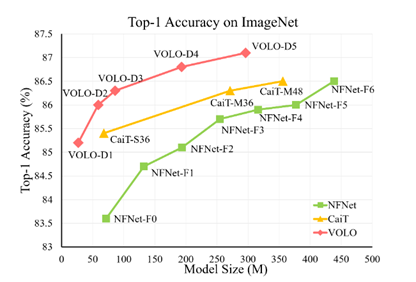
新加坡 SEA AI 实验室最近的项目 VOLO ( Vision Outlooker )展示了一种高效且可扩展的 Vision transformer 模式体系结构,该体系结构仅使用 ImageNet-1K 数据集就大大缩小了差距。
VOLO 引入了一种新颖的 outlook attention ,并提出了一种简单而通用的架构,称为 Vision Outlooker 。与自我关注不同,自我关注侧重于粗略级别的全局依赖关系建模, outlook 关注有效地将更精细级别的功能和上下文编码为标记。这对识别性能极为有利,但在很大程度上被自我注意所忽视。
实验表明, VOLO 在 ImageNet-1K 分类上达到了 87.1% 的 top-1 精度,这是第一个在这个竞争基准上超过 87% 精度的模型,无需使用任何额外的训练数据。
此外,经过预训练的 VOLO 可以很好地转移到下游任务,例如语义切分。
| Settings | LV-ViT | CaiT | NFNet-F6 | NFNNet-F5 | VOLO-D5 |
| Test Resolution | 448×448 | 448×448 | 576×576 | 544×544 | 448×448/512×512 |
| Model Size | 140M | 356M | 438M | 377M | 296M |
| Computations | 157B | 330B | 377B | 290B | 304B/412B |
| Architecture | Vision Transformer | Vision Transformer | Convolutions | Convolutions | VOLO |
| Extra Augmentations | Token Labeling | Knowledge Distill | SAM | SAM+augmult | Token Labeling |
| ImageNet Top-1 Acc. | 86.4 | 86.5 | 86.5 | 86.8 | 87.0/87.1 |
尽管 VOLO 模型显示出了出色的计算效率,但训练 SOTA 性能模型并非易事。
在这篇文章中,我们将介绍我们在 NVIDIA DGX SuperPOD 上基于 NVIDIA ML 软件堆栈和 Infiniband 群集技术培训 VOLO 模型所获得的技术和经验。
培训方法
培训 VOLO 模型需要考虑培训策略、基础设施和配置规划。在本节中,我们将讨论此解决方案中应用的一些技术。
培训策略
始终使用原始 ImageNet 样本质量数据训练模型,并在细粒度上执行神经网络( NN )架构搜索,使理论上的研究更加巩固。然而,这需要计算资源预算的很大一部分。
在这个项目的范围内,我们采用了一种粗粒度的训练方法,它不像细粒度的方法那样能够访问尽可能多的神经网络体系结构。然而,它能够以更少的时间和更低的资源预算显示 EIOF 。在这种替代策略中,我们首先使用分辨率较低的图像样本训练潜在的神经网络候选,然后使用高分辨率图像进行微调。
在早期的工作中,这种方法在降低边际模型性能损失的计算成本方面被证明是有效的。
基础设施
实际上,我们在本次培训中使用了两种类型的集群:
- 一个用于基础模型预训练,它是一个基于 NVIDIA DGX A100 的 DGX 吊舱,由使用 NVIDIA Mellanox HDR Infiniband 网络集群的 5 个 NVIDIA DGX A100 系统组成。
- 一个用于微调,即 NVIDIA DGX SuperPOD ,由 DGX A100 系统和 NVIDIA Mellanox HDR Infiniband 网络组成。
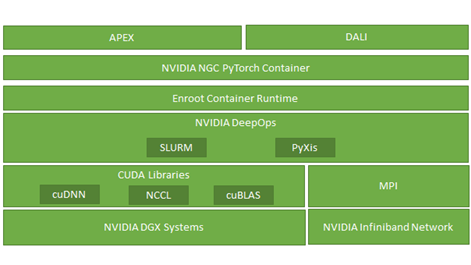
软件基础设施在这一过程中也发挥了重要作用。图 2 显示,除了基础的标准深度学习优化 CUDA 库(如 cuDNN 和 cuBLAS )外,我们还广泛利用 NCCL 、 enroot 、 PyXis 、 APEX 和 DALI 来实现培训性能的亚线性可扩展性。
DGX A100 POD 集群主要用于使用较小尺寸图像样本的基础模型预训练。这是因为基本模型预训练的内存限制较少,可以利用 NVIDIA A100 GPU 的计算能力优势。
相比之下,微调是在 NVIDIA DGX-2 的 NVIDIA DGX SuperPOD 上执行的,因为微调过程使用更大的图像,每台计算能力需要更多的内存。
培训配置
需要引入句子
| D1 | D2 | D3 | D4 | D5 | |
| MLP Ratio | 3 | 3 | 3 | 3 | 4 |
| Optimizer | AdamW | ||||
| LR Scaling | LR = LRbase x Batch_Size/1024, where LRbase=8.0e-4 | ||||
| Weight Decay | 5e-2 | ||||
| LRbase | 1.6e-2 | 1e-3 | 1e-3 | 1e-3 | 1e-4 |
| Stochastic Depth Rate | 0.1 | 0.2 | 0.5 | 0.5 | 0.75 |
| Crop Ratio | 0.96 | 0.96 | 0.96 | 1.15 | 1.15 |
表 2 :。模型设置(对于所有模型,批大小设置为 1024 )
我们在 ImageNet 数据集上评估了我们提出的 VOLO 模型。在培训期间,没有使用额外的培训数据。我们的代码基于 PyTorch 、令牌标记工具箱和 PyTorch 图像模型( timm )。我们使用带有标记的 LV-ViT-S 模型作为基线。
安装说明
- 我们使用了 AdamW 优化器和线性学习率缩放策略 LR = LR基础x Batch \ u 大小/ 1024 和 5 × 10 − 2 先前工作建议的重量衰减率,表 3 中给出了所有 VOLO 模型的 LRbase 。
- 使用随机深度。
- 我们在 ImageNet 数据集上训练了 300 个时代的模型。
- 对于数据扩充方法,我们使用 CutOut 、 RandAug 和 MixToken 的标记目标。
- 我们没有使用 MixUp 或 CutMix ,因为它们与 MixToken 冲突。
训练前
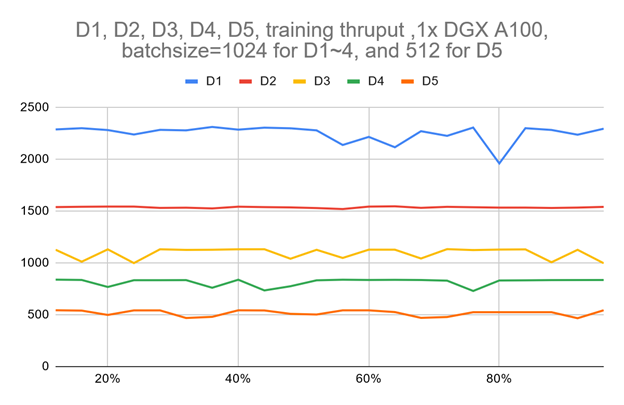
在本节中,我们以 VOLO-D5 为例来演示如何训练模型。
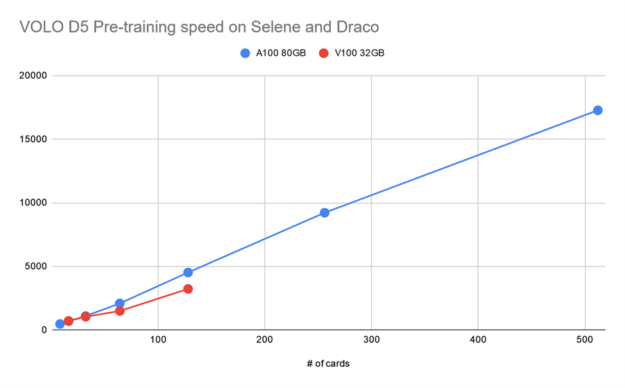
图 3 显示,使用单个 DGX A100 的 VOLO-D5 的训练吞吐量约为 500 图像/秒。据估计,完成一个完整的预训练周期大约需要 170 个小时,这需要使用 ImageNet-1K 进行 300 个阶段。这相当于 100 万张图片的一周。
为了加快速度,基于一个由五个 DGX A100 节点组成的简单参数服务器架构集群,我们大致实现了 2100 个图像/秒的吞吐量,这可以将预训练时间减少到约 52 小时。
VOLO-D5 模型预训练可以使用以下代码示例在单个节点上启动:
CUDA_VISIBLE_DEVICES=0,1,2,3,4,5,6,7 ./distributed_train.sh 8 /path/to/imagenet \ --model volo_d5 --img-size 224 \ -b 44 --lr 1.0e-4 --drop-path 0.75 --apex-amp \ --token-label --token-label-size 14 --token-label-data /path/to/token_label_data
对于 MNMG 培训案例,它需要将培训集群详细信息作为命令行输入的一部分。首先,我们根据节点和集群架构设置 CPU 、 MEM 、 IB 绑定。预训练阶段的集群是 DGX A100 POD ,每个 CPU 插槽有四个 NUMA 域,每个 A100 GPU 有一个 IB 端口,因此我们将每个列组绑定到 NUMA 节点中距离其 GPU 最近的所有 CPU 核。
- 对于内存绑定,我们将每个列组绑定到最近的 NUMA 节点。
- 对于 IB 绑定,我们为每个 GPU 绑定一个 IB 卡,或者尽可能接近这样的设置。
由于 VOLO 模型培训基于 PyTorch ,并且简单地利用了默认的 PyTorch 分布式培训方法,因此我们的多节点多 GPU 培训基于一个简单的参数服务器架构,该架构适合 NVIDIA DGX SuperPOD 的 fat 树网络拓扑。
为了简化调度,分配节点列表中的第一个节点始终用作参数服务器和工作节点,而所有其他节点都是工作节点。为了避免潜在的存储 I / O 开销,数据集、所有代码、中间/里程碑检查点和结果都保存在一个基于 DDN 的高性能分布式存储后端。它们通过 100G NVIDIA Mellanox EDR Infiniband 网络装载到所有工作节点。
为了加速数据预处理和流水线数据加载, NVIDIA DALI 配置为每个 GPU 进程使用一个专用数据加载程序。
微调
使用以下代码示例,在单个节点上运行 VOLO-D5 模型微调非常简单:
CUDA_VISIBLE_DEVICES=0,1,2,3,4,5,6,7 ./distributed_train.sh 8 /path/to/imagenet \ --model volo_d5 --img-size 512 \ -b 4 --lr 2.3e-5 --drop-path 0.5 --apex-amp --epochs 30 \ --weight-decay 1.0e-8 --warmup-epochs 5 --ground-truth \ --token-label --token-label-size 24 --token-label-data /path/to/token_label_data \ --finetune /path/to/pretrained_224_volo_d5/
如前所述,由于用于微调的图像大小远远大于预训练阶段使用的图像大小,因此必须相应地减小批量大小。将工作负载放入 GPU 内存中,这使得进一步扩展训练到更大数量的 GPU 并行任务是必须的。

大多数微调配置类似于预训练阶段。
结论
在这篇文章中,我们展示了在大规模人工智能超级计算机上训练 SOTA 大规模视觉 transformer 模型(如 VOLO \ u D5 )的主要技术和程序,如基于 NVIDIA DGX A100 的 DGX SuperPOD 。经过训练的 VOLO \ u D5 模型在图像分类模型排名中取得了最佳的 Top-1 精度,无需使用 ImageNet-1k 数据集以外的任何其他数据。
这项工作的代码资源(包括用于运行实验的 Docker 映像和 Slurm 调度程序脚本)在 sail-sg/volo GitHub repo 中是开源的,以便将来可以在 VOLO \ u D5 上进行更广泛的研究。有关更多信息,请参阅 VOLO :视觉识别的视觉观察家 。
未来,我们希望进一步扩展这项工作,以培训更智能、自我监督、更大规模的模型,使用更大的公共数据集和更现代化的基础设施,例如, NVIDIA DGX SuperPOD 和 NVIDIA H100 GPU。