
Autonomous cars must locate and classify all the relevant objects on the road (such as other vehicles) so that they can brake or safely maneuver around vehicles or pedestrians. They must also detect lane markers in order to center the car within its lane. Deep learning enables machines to detect and classify objects of interest more accurately than people can and is becoming the primary enabling technology for environment perception.
A new NVIDIA Developer Blog post by Avi Nehemiah and Arvind Jayaraman from MathWorks explains how deep learning is used to solve two common perception tasks for automated driving:
- Vehicle detection
- Lane detection
The examples in the post use MATLAB’s new capabilities for deep learning and GPU acceleration to label ground truth, create new networks for detection and regression, and to evaluate the performance of a trained network.
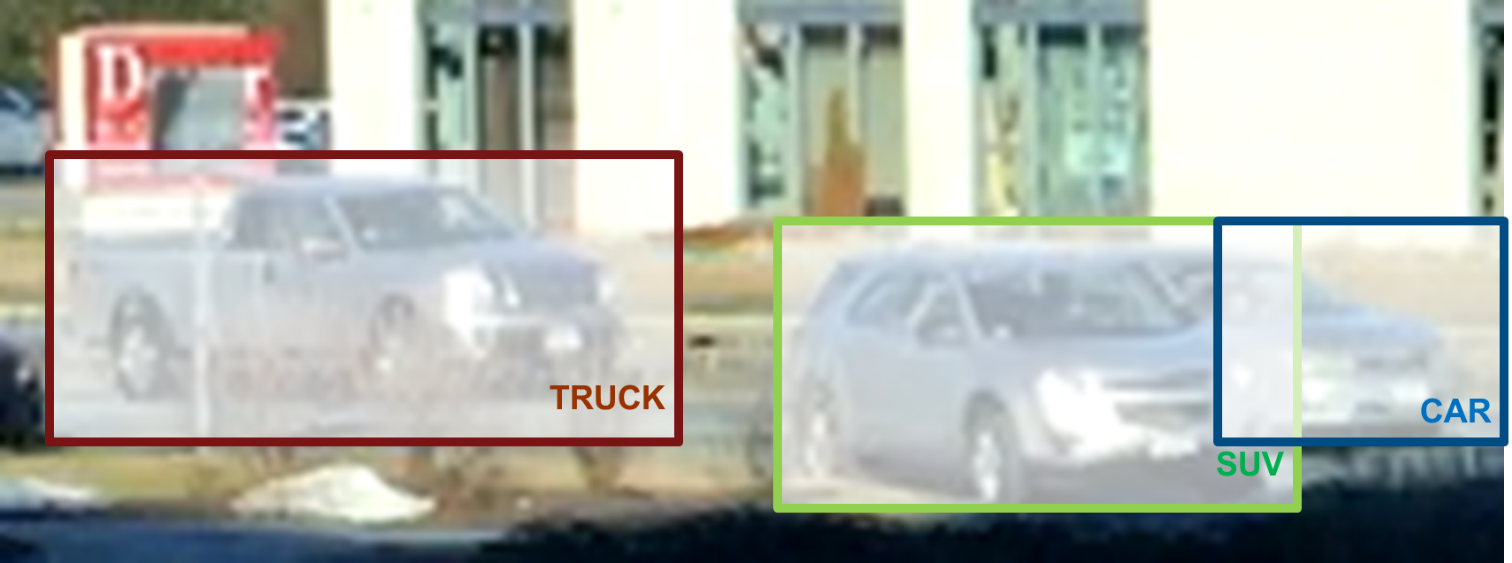
Object detection is used to locate pedestrians, traffic signs, and other vehicles. The post’s vehicle detection example walks through how to use deep learning to create an object detector.
Lane detection is the identification of the location and curvature of lane boundaries of visible lanes on a roadway. This is useful to help a vehicle center it’s driving path and safely navigate lane changes. The post’s lane detection example constructs a CNN that performs regression to output the coefficients of curves defining the lanes.
Read more >