在 10 Mbps 以太网的旧时代,早在 Time-Sensitive Networking 成为一种东西之前,最先进的共享网络基本上要求数据包发生冲突。对于当时的原始技术来说,这是非常实用的……在计算上优于任何需要仔细管理访问介质的解决方案。
在破坏了彼此的数据后,两个相互竞争的电台将等待(随机地浪费更多的时间),然后再尝试传输。这被认为是正常的,因为最小大小的帧是 64 字节( 512 位),并且合理估计该帧将消耗导线的时间是基于网络速度(每秒 1000 万位意味着每个位需要约 0.1 微秒),因此 512 位至少等于 51.2 微秒。
以太网技术已从 80 年代初的 10 Mbps 发展到今天的 400Gbps ,未来计划为 800Gbps 和 1.6Tbps (图 1 )。
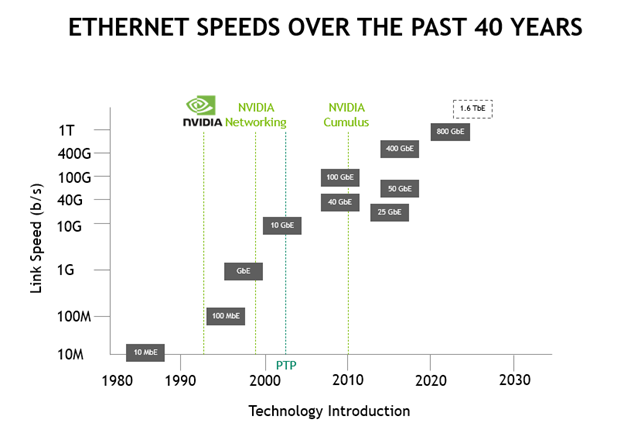
应该清楚的是,希望你的网络运行得更快是一个持续的趋势!因此,任何必须跨这些网络管理事件的应用程序都需要一种同步良好、普遍理解的跨网络时间感,时间分辨率随着网络速度的加快而逐渐变窄。
这就是为什么 IEEE 至少自 2008 年以来一直在研究如何支持对时间敏感的网络应用程序,最初用于音频和视频应用程序,但现在用于更丰富、更重要的应用程序。
时间敏感网络的三个用例
对精确和准确定时的要求超出了物理和数据链路层,扩展到高度依赖于来自网络的可预测、可靠服务的某些应用程序。这些新兴应用程序利用了对时间的精确、准确和高分辨率理解。
5G 、 6G 及以上
从 3GPP 的 5G 系列协议开始,一些应用程序(如物联网或 IIoT )不一定需要极高的带宽。它们确实需要严格控制对无线介质的访问,以实现低延迟和低抖动的可预测访问。这是通过向所有参与站提供精确、准确和高分辨率的时间来实现的。

在时域访问方式中,每个站点请求并被授予使用介质的权限,然后网络调度器通知站点他们可以使用介质的时间和持续时间。
5G 和未来网络向所有参与站点提供准确、精确和高分辨率的时间,以实现这种新的高价值应用。以前,新网络最理想的属性是速度。这些新的应用程序实际上需要控制而不是速度。
成功启用这些应用程序需要参与站对绝对时间具有相同的理解,以便它们不会太早或太迟开始传输,或传输错误的时间量。
如果一个电台的传输时间过快或过长,它可能会干扰另一个电台。如果它开始传输得太晚,它可能会浪费一些宝贵的机会来使用这种媒介,因为在这种情况下,它可能会传输的时间少于它被允许传输的时间。
我应该指出, 5G 显然不是以太网,但以太网技术是 5G 无线接入网络如何通过从城域数据中心延伸出来的 backhaul 网络连接在一起的。网络的时间关键部分从以太网回程域扩展到数据中心和无线接入网络。
什么样的应用程序需要这样的精度?
遥测等应用需要这种精度。未来的测量可以通过等待下一个读数隐式地从错过的读数中恢复。例如,仪表读数可能每 30 分钟生成一次。
对于必须以亚毫秒分辨率理解其位置的机器人呢?丢失一些位置报告可能会损坏机器人,损坏附近或连接的设备,损坏机器人正在处理的材料,甚至导致附近人员死亡。
你可能会认为这与 5G 无关,因为它显然是一个制造用例。在这种情况下, 5G 可能是更好的解决方案,因为精确时间协议( PTP )从一开始就内置在协议堆栈中。
PTP ( IEEE 1588-2008 )是一套协议和配置文件的基础,这些协议和配置文件能够在网络设备之间以高精度和高分辨率同步高精度的时间。
时间敏感网络技术使 5G (或后续)网络能够服务于数千或上万个节点。根据连接设备的需求,它提供了高速、可预测延迟或低抖动服务的不断变化的组合。
是的,这些用户可能是手机、工业机器人或医疗器械的普通用户。关键是,通过内置时间敏感网络,只要带宽(和时间)可用,网络可以满足各种用例。
包含 NVIDIA Cumulus Linux 5.0 及更高版本的产品中的 PTP 实现定期提供深亚微秒(甚至亚微秒)精度,支持 5G 应用的各种要求。
媒体和娱乐
电视行业中的大多数视频内容目前以串行数字接口( SDI )格式存在。然而,该行业正在向互联网协议( IP )模式过渡。
在媒体和娱乐行业,有几种场景需要考虑,例如演播室(例如组合多个摄像机反馈和叠加)、视频制作、视频广播(从单点到多个用户)和多屏幕。
时间同步对于这些类型的活动至关重要。

在媒体和广播领域,一致的时间同步对于提供最佳观看体验和防止帧对齐、假唱以及视频和音频同步问题至关重要。
在基带世界中,参考黑或 genlock 用于保持相机和其他视频源帧同步,并避免在从一个源切换到另一个源时引入令人讨厌的伪影。
但是,随着 IP 的采用,更具体地说,是 SMPTE-2110(或带有 AES67 的 SMPTE-2022-6),您需要一种不同的方式来提供计时。随之而来的是 PTP,也称为 IEEE 1588 (PTP V2)。
PTP 完全基于网络,可以在已经用于传输和接收基本流的相同数据网络连接上传输。各种配置文件,如 SMPTE 2059-2 和 AES67 ,提供了一组标准化的配置和规则,以满足不同类型分组网络的要求。
Spectrum 完全支持 SMPTE 2059-2 和其他配置文件下的 PTP 1588 。
汽车应用
新一代的车载区域网络( CAN )已从共享/总线架构发展到 5G 无线接入网络( RAN )或 IT 环境中的架构:交换拓扑。

当涉及交换机时,可能会因争用或缓冲而导致数据包丢失或延迟变化,从而限制或消除对汽车中各种应用程序可能需要的网络的可预测访问。
自动驾驶汽车必须定期以相当高的频率处理视频和其他传感器输入,以确定车辆的安全前进路径。车辆中的引导智能取决于定期访问其传感器,因此网络必须能够保证对传感器的访问足够频繁,以支持必须解释这些传感器的算法的输入。
例如,方向盘和制动器读取摩擦力,启用防抱死和防滑功能,并与摩擦制动相比权衡再生能量捕获。视频输入,可能还有雷达和激光雷达(光探测和测距),不断扫描前方道路。它们使解释算法能够确定是否出现了需要转向、制动或停车的新障碍。
所有这些都是在车辆导航子系统使用 GPS 接收粗定位数据并将其与地图对齐时发生的,地图与摄像机的视觉输入相结合,以建立随时间变化的准确定位信息,确定法律允许的最大速度,并将法律限制与当地条件相结合,以确定安全速度。
这些不同的传感器和相关的独立子系统必须能够在可预测的延迟/低抖动的基础上将其输入传送到主处理器及其自驱动算法,同时网络还支持非延迟关键应用程序。整个系统的正确、可预测的运行对乘客(和行人!)至关重要。
除了支持车辆安全运行的传感器和软件外, CAN 上运行的其他应用程序对乘客来说仍然很重要,但显然不是至关重要的:
- 操作通风或气候控制系统以保持每个座椅的理想温度(包括空气运动、座椅加热或冷却等)
- 向各种乘客提供多个音频或视频内容流
- 与其他乘客或附近车辆上的乘客玩游戏
- 重要的日常维护活动,如测量轮胎的充气压力、蓄电池充电水平、制动效率(可能表明过度磨损)等
其他低频但也具有时间关键性的传感器输入为车辆的自诊断提供了必要的输入,以确定何时应将其带回维修站进行维修,或仅为其电池充电。
要求所有这些不同的应用程序共享车辆中的同一物理网络(在同一 CAN 上运行)是需要 PTP 的原因。
工程师将设计 CAN ,使其具有足够的瞬时带宽,以支持所有关键设备的最坏情况需求(例如争用很少或不可能),同时动态允许所有设备请求访问量和每个设备所需的延迟边界,这些延迟边界可以随时间变化。有意使用双关语。
在自动驾驶汽车的世界中, PTP 是实现车内技术的关键,支持车辆的安全运行,同时提供丰富的娱乐和舒适性。
结论
您已经看到了三个应用程序示例,其中对网络访问的控制与原始速度同等重要。在每种情况下,应用程序都定义了精确/准确/高分辨率计时的要求,但网络使用通用机制来提供所需的服务。
随着网络速度的不断加快,用于区分事件的时间分辨率与带宽的倒数成线性比例。
强大的 PTP 实现,例如 NVIDIA Cumulus Linux 5.0 设备中的实现,体现了可扩展的协议机制,将适应未来更快的网络。它们将提供定时精度和精度,以适应这些网络不断增长的速度。
未来的应用程序有望继续收到他们所需的可预测的时间相关服务。即使网络继续以更快的速度、更细粒度的时间分辨率支持更多用户,这也是事实。
有关更多信息,请参阅以下参考资料:
- NVIDIA Cumulus Linux 5.1 用户指南
- NVIDIA Cumulus Linux datasheet
- NVIDIA 积云 Linux 第页
- NVIDIA 航空基础设施仿真平台
- NVIDIA 宣布推出频谱高性能数据中心网络基础设施平台
- 精密定时协议标准 ( 2008 年,更新 2019 )
- Time Appliances 项目
- 分布式数据中心中的时间同步