DEVELOPER
首页
博客
论坛
文档
下载
社区研讨会
培训
搜索
Join
ROS
2023年 12月 14日
使用 NVIDIA Isaac 模拟和本地化 Husky 机器人
由 Clearpath Robotics 开发的 Husky 机器人,是一款专为室内和室外研究用途设计的多功能四轮平台。
3 MIN READ
使用 NVIDIA Isaac 模拟和本地化 Husky 机器人
2023年 10月 25日
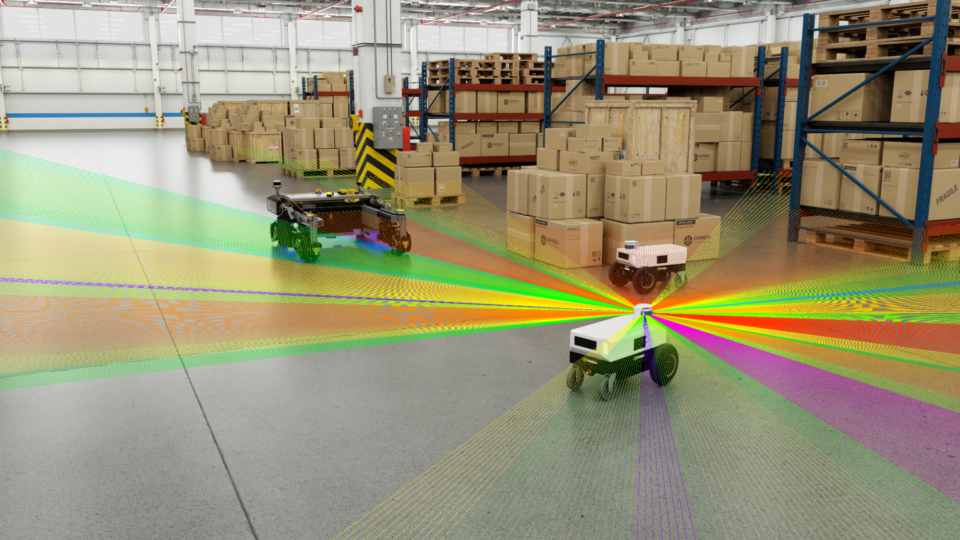
如何训练自主移动机器人使用合成数据检测仓库托盘搬运车
合成数据在训练部署在自主移动机器人(AMR)上的感知 AI 模型时起着关键作用。这一过程在制造业中变得越来越重要。
3 MIN READ
如何训练自主移动机器人使用合成数据检测仓库托盘搬运车
2023年 10月 18日
借助 NVIDIA Isaac 平台上的高级模拟和感知工具加速 AI 机器人开发
NVIDIA 于今日在 ROSCon 2023 发布了对 NVIDIA Isaac Robotics 平台的重大更新。
2 MIN READ
借助 NVIDIA Isaac 平台上的高级模拟和感知工具加速 AI 机器人开发
2023年 5月 29日
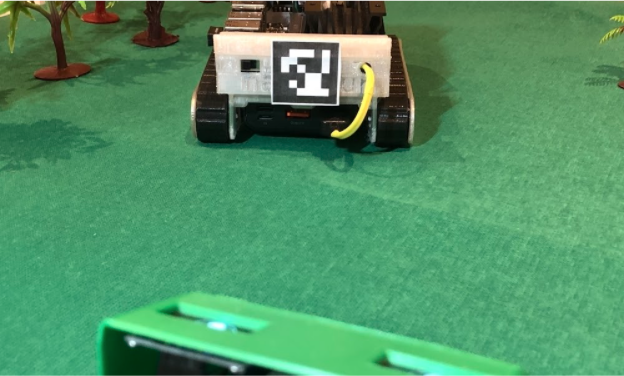
用 NVIDIA Isaac Sim 、 ROS 和 Nimbus 开发多机器人环境
随着越来越多的自主机器人被部署在现实世界场景中,对高保真多机器人仿真环境的需求正在迅速增长。在这篇文章中,
3 MIN READ
用 NVIDIA Isaac Sim 、 ROS 和 Nimbus 开发多机器人环境
2023年 4月 18日
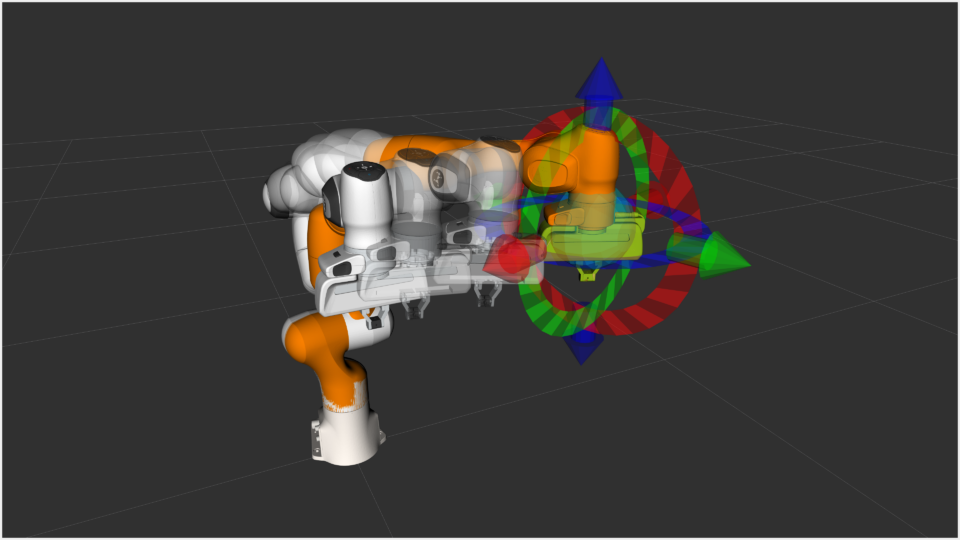
使用 ROS 2 MoveIt 和 NVIDIA Isaac Sim 创建逼真的机器人模拟
MoveIt是一个机器人操纵平台,融合了运动规划、操纵、 3D 感知、运动学、控制和导航方面的最新进展。PickNik Robotics,
1 MIN READ
使用 ROS 2 MoveIt 和 NVIDIA Isaac Sim 创建逼真的机器人模拟
2023年 4月 18日
使用 NVIDIA Isaac ROS 开发人员预览版 3 构建高性能机器人应用程序
机器人的复杂性正在增加,具有更高的自主性、更多的传感器数量和多样性,以及更多基于传感器融合的算法。
2 MIN READ
使用 NVIDIA Isaac ROS 开发人员预览版 3 构建高性能机器人应用程序
2022年 10月 19日
自主移动机器人的开源车队管理工具
在 ROSCon 2022 上, NVIDIA 发布了最新的 Isaac ROS 软件版本 Developer Preview ( DP )…
2 MIN READ
自主移动机器人的开源车队管理工具
2022年 9月 30日
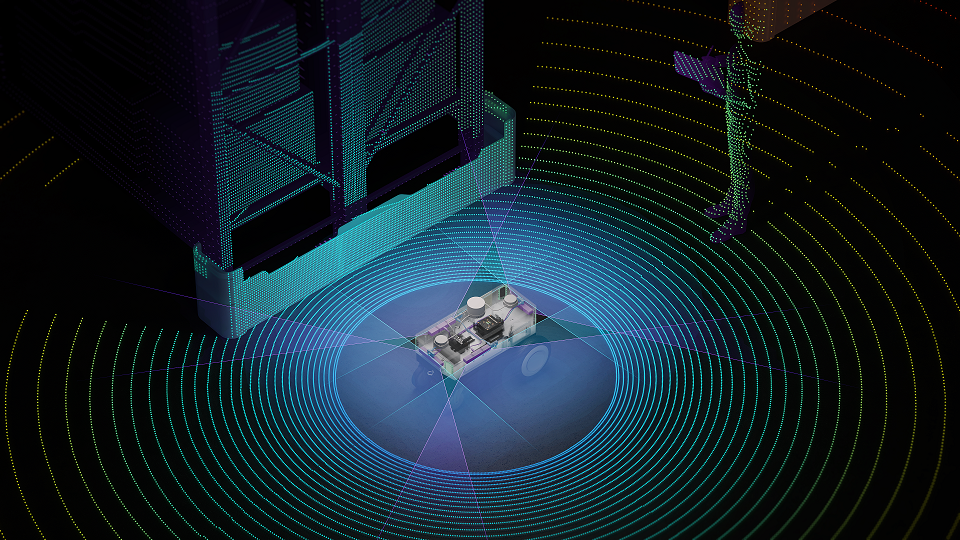
使用 ROS 2 和 TAO-PointPillars 检测点云中的对象
准确、快速的目标检测是机器人导航和避碰的重要任务。自主代理需要一张清晰的周围地图,才能导航到目的地,同时避免碰撞。例如,
2 MIN READ
使用 ROS 2 和 TAO-PointPillars 检测点云中的对象
2022年 6月 17日
使用 ISAAC Sim 加速 AI 机器人的开发、测试和培训
今天, NVIDIA 宣布 2022.1 版 NVIDIA ISAAC Sim . 作为一种机器人仿真和合成数据生成( SDG )工具,
1 MIN READ
使用 ISAAC Sim 加速 AI 机器人的开发、测试和培训
2022年 5月 24日
通过 NVIDIA ISAAC ROS 传输改善 ROS 2 应用的感知性能
自 2021 10 月以来, NVIDIA 和 Open Robotics 合作推出了两项重要的更改,现已发布在简陋的 ROS 2 版本中,
2 MIN READ
通过 NVIDIA ISAAC ROS 传输改善 ROS 2 应用的感知性能
2021年 10月 25日
为 ROS 设计具有 NVIDIA ISAAC 宝石的机器人
NVIDIA ISAAC GEMs for ROS 为您的 ROS2 应用程序提供了一套 GPU 加速包,
3 MIN READ
为 ROS 设计具有 NVIDIA ISAAC 宝石的机器人
加载更多