今天, NVIDIA 宣布 2022.1 版 NVIDIA ISAAC Sim . 作为一种机器人仿真和合成数据生成( SDG )工具, NVIDIA Omniverse 应用程序加速了机器人领域人工智能的开发、测试和培训。
使用 ISAAC Sim ,开发人员可以生成生产质量数据集来训练 AI 感知模型。开发人员还将能够模拟机器人导航和操纵,并构建一个测试环境来不断验证机器人应用程序。
最新版本通过 NVIDIA ISAACCortex(一种用于训练协作机器人(COBOT)的决策框架)和GPU加速强化学习(RL)框架 ISAAC Gym(一种GPU加速强化学习)框架)等新工具,推进了人工智能机器人的时代。 NVIDIA ISAAC Replicator是一套合成数据生成工具、API和工作流,它也已更新了新功能,可以按程序为SDG生成工业环境。
NVIDIA ISAAC 是 2022.1 版本亮点
ISSAC Cortex:编程 cobot 任务就像编程游戏 AI 一样简单。利用此决策框架帮助 COBOT 开发任务感知和自适应技能。使用它对世界的信念表示,类似于机器人的大脑,真实或模拟的数据可以用作输入,并生成最终的驱动。
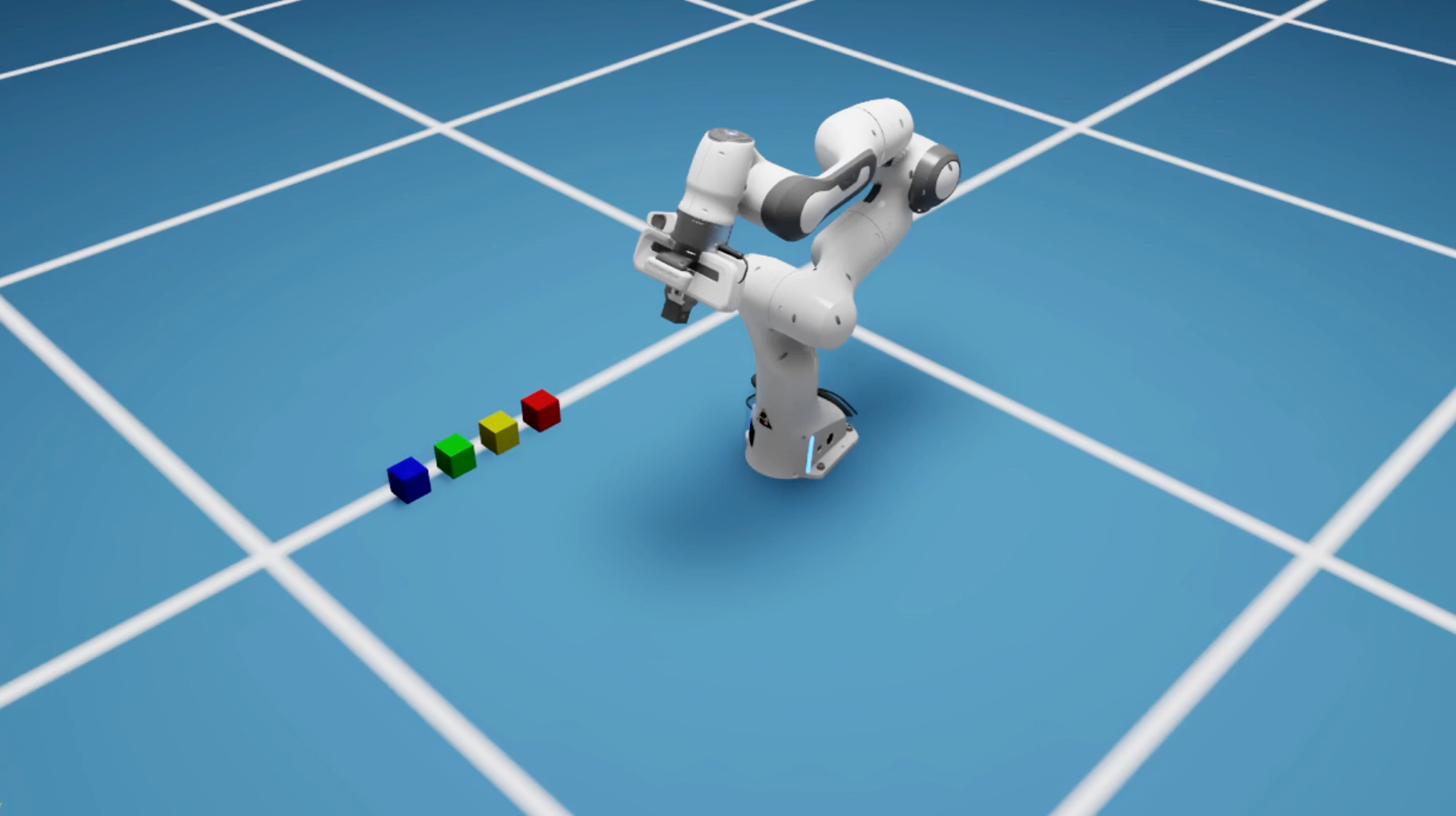
ISAAC Gym:用几分钟而不是几周的时间训练机器人。使用 RL 训练复杂的机器人技能。 ISAAC GYM 是一种 GPU 加速工具,它将整个 RL 训练工作流保持在 GPU 上,这对于减少训练时间至关重要。
Omnigraph: 使用可视化编程简化应用程序开发和调试。在这个 Omniverse 可视化编程和脚本环境中,通过可视化方式将计算节点连接在一起,构建机器人应用程序。机器人应用程序往往是非常模块化的,非常适合于可视化编程。
ISAAC Sim/露台连接器:根据任务在两个模拟器之间移动。使用 Gazebo 的 ROS 开发人员可以将仿真资产导入 ISAAC Sim 卡,以执行生成合成数据集或高保真渲染等任务。此外,通过连接 Omniverse 的 nucleus 服务器,多个露台模拟可以保持实时同步。
其他特征:
- Windows 支持(有限)
- 新机器人
- 四足动物: A1 , GO1 , Anymal
- AMR : Obelix
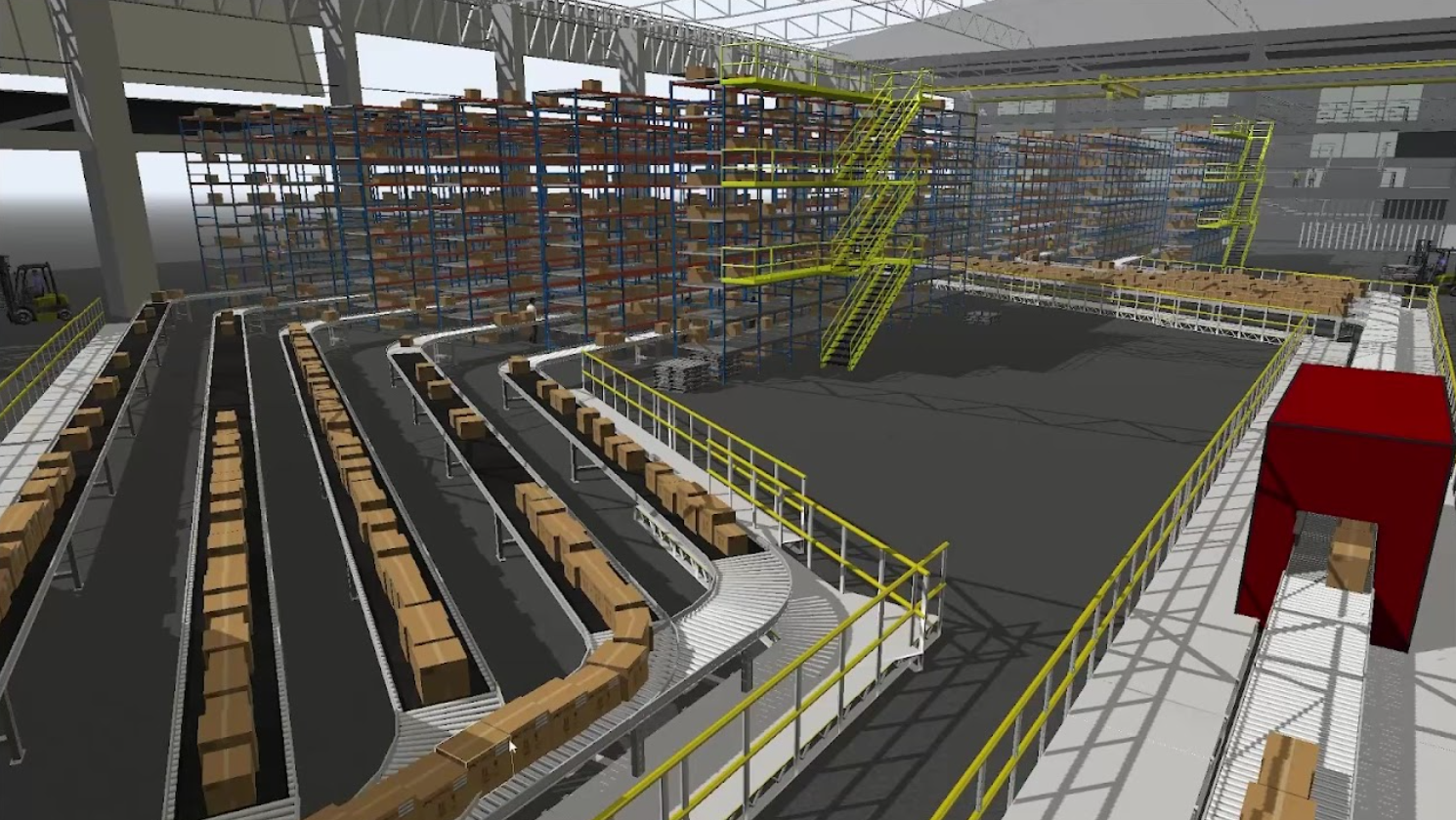
- 新的模块化仓库和输送机资产
- Omnigraph 中实施的新 ROS 管道
使用合成数据训练 AI
ISAAC Replicator 是 ISAAC Sim 中的合成数据生成工具。合成数据在机器人技术中非常有用,可以引导训练,解决长尾数据集的挑战,并提供不可用的真实世界数据,如合成视频中的速度和方向。自治机器需要在训练中使用合成数据,以确保模型的鲁棒性。
在最新版本中,添加了一个名为 SceneBlox 的新 SDG 功能,以按程序生成场景。 SceneBlox 可用于自动创建仓库等工业环境。还添加了新的示例,演示了如何使用 Replicator 生成合成数据和训练姿势估计模型。

开始
- 下载 ISAAC Sim .
- 看 ISAAC Sim 概述 Liila Torabi 于 2022 年 ICRA 上发表。
- 看 ISAAC Cortex GTC 呈现 作者: Nathan Ratliff 。
- 看 ISAAC Replicator Composer 网络研讨会 作者: Matthew Trepte 。