DEVELOPER
首页
博客
论坛
文档
下载
社区研讨会
培训
搜索
Join
机器人
2024年 4月 26日
使用张量并行技术进行自动驾驶感知模型训练
由于采用了多摄像头输入和深度卷积骨干网络,用于训练自动驾驶感知模型的 GPU 内存占用很大。
3 MIN READ
使用张量并行技术进行自动驾驶感知模型训练
2024年 4月 22日
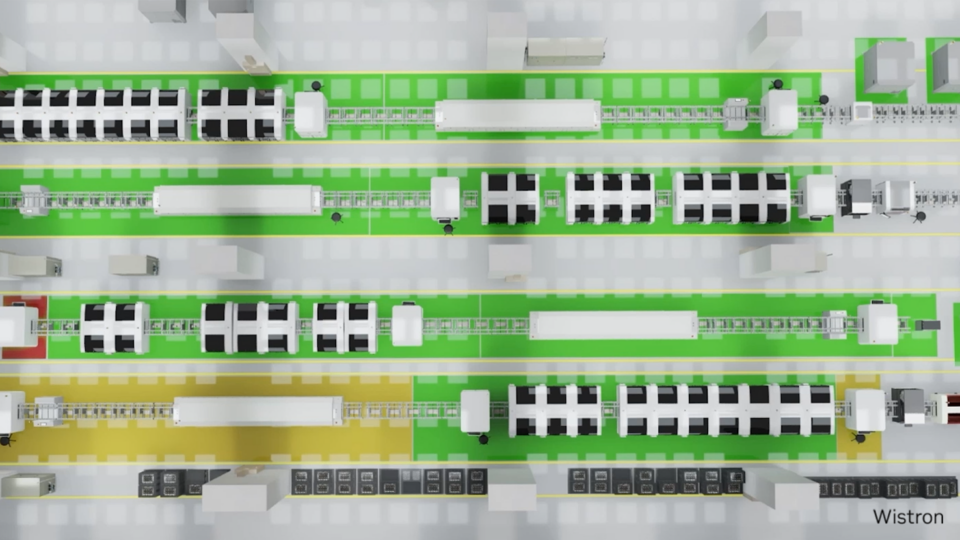
使用 OpenUSD 和 NVIDIA Omniverse 开发虚拟工厂解决方案
与 NVIDIA AI、Omniverse 和通用场景描述 (OpenUSD) 等平台一起,业界开发者正在构建虚拟工厂解决方案。
1 MIN READ
使用 OpenUSD 和 NVIDIA Omniverse 开发虚拟工厂解决方案
2024年 3月 20日
突破性的 NVIDIA cuOpt 算法将路线优化解决方案的速度提高 100 倍
NVIDIA cuOpt 是一个加速优化引擎,专为解决复杂的路线规划问题而设计。它能够高效地处理各种问题,包括但不限于:休息和等待时间、
2 MIN READ
突破性的 NVIDIA cuOpt 算法将路线优化解决方案的速度提高 100 倍
2024年 3月 20日
使用 NVIDIA Holoscan 1.0 开发生产就绪型 AI 传感器处理应用
边缘 AI 开发者正在为安全关键型和受监管用例构建 AI 应用和产品。借助 NVIDIA Holoscan 1.0,
2 MIN READ
使用 NVIDIA Holoscan 1.0 开发生产就绪型 AI 传感器处理应用
2024年 3月 18日
借助 NVIDIA OSMO 扩展 AI 机器人开发工作负载
自主机器开发是一个数据生成和收集、模型训练和部署的迭代过程,其特点是跨异构计算资源的复杂的多阶段、多容器工作流。 涉及多个团队,
1 MIN READ
借助 NVIDIA OSMO 扩展 AI 机器人开发工作负载
2024年 3月 1日
通过线下实践学习,充分利用 NVIDIA GTC 2024
我们很高兴能在圣何塞会议中心参加今年的 GTC 大会,与数千名开发者、行业领导者、研究人员和合作伙伴共襄盛会。通过亲自参加 GTC,
1 MIN READ
通过线下实践学习,充分利用 NVIDIA GTC 2024
2024年 2月 19日
体验 NVIDIA cuOpt 加速优化,提高运营效率
本周的 Model Monday 版本亮点是 NVIDIA cuOpt,这是一款创新的加速优化引擎,专为帮助团队解决复杂的路线规划问题而设计。
2 MIN READ
体验 NVIDIA cuOpt 加速优化,提高运营效率
2024年 1月 24日
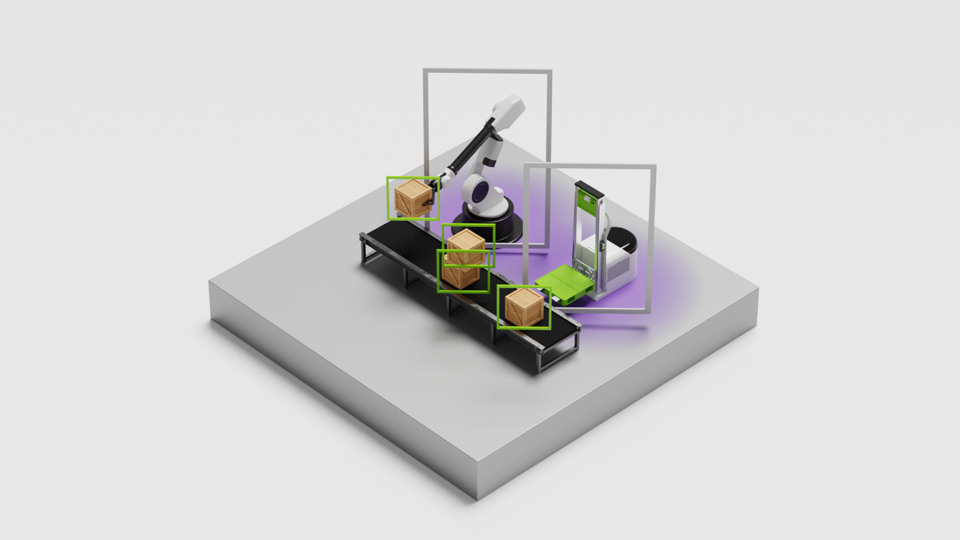
利用 AI 的强大功能提升工厂安全性
随着工业自动化程度的提高,安全成为企业面临的更大挑战和首要任务。 安全性包含多个方面: 推动自动化的技术解决方案也可用于解决安全问题:
2 MIN READ
利用 AI 的强大功能提升工厂安全性
2024年 1月 22日
借助 NVIDIA Isaac Sim 在工作站上对摄像头性能进行基准测试
机器人通常配备摄像头。在设计数字孪生仿真时,在模拟环境中准确复制其性能非常重要。 但是,为了确保模拟平稳运行,必须检查运行模拟的工作站的性能。
2 MIN READ
借助 NVIDIA Isaac Sim 在工作站上对摄像头性能进行基准测试
2024年 1月 18日
使用 NVIDIA Isaac ROS 为深度物体姿态估计训练生成合成数据
机器人智能体要与环境中的物体进行交互,必须了解周围物体的位置和方向。此信息描述了 3D 空间中刚体的六自由度 (DOF) 姿态,
3 MIN READ
使用 NVIDIA Isaac ROS 为深度物体姿态估计训练生成合成数据
2023年 12月 19日
2023 年最热门的 NVIDIA 技术博客文章:生成式 AI、LLM、机器人开发和虚拟世界的突破
在 NVIDIA 激动人心的又一年即将结束之际,是时候回顾 2023 年 NVIDIA 技术博客中最热门的案例了。 生成式 AI、
2 MIN READ
2023 年最热门的 NVIDIA 技术博客文章:生成式 AI、LLM、机器人开发和虚拟世界的突破
2023年 12月 14日
使用 NVIDIA Isaac 模拟和本地化 Husky 机器人
由 Clearpath Robotics 开发的 Husky 机器人,是一款专为室内和室外研究用途设计的多功能四轮平台。
3 MIN READ
使用 NVIDIA Isaac 模拟和本地化 Husky 机器人
2023年 11月 28日
使用 Bi-Level 模仿学习仿真现实交通行为
无论是突然加塞(cut-in),还是无意地 U 形掉头,人类驾驶员的行为通常难以预测。行为的不可预测性源自人类决策过程的天然复杂性…
1 MIN READ
使用 Bi-Level 模仿学习仿真现实交通行为
2023年 11月 17日
使用适用于 ROS 的 NVIDIA Isaac Transport 提升自定义 ROS 图形
适用于 ROS 的 NVIDIA Isaac Transport(NITROS)是在 ROS 2 Humble 中引入的两种硬件加速功能…
4 MIN READ
使用适用于 ROS 的 NVIDIA Isaac Transport 提升自定义 ROS 图形
2023年 11月 13日
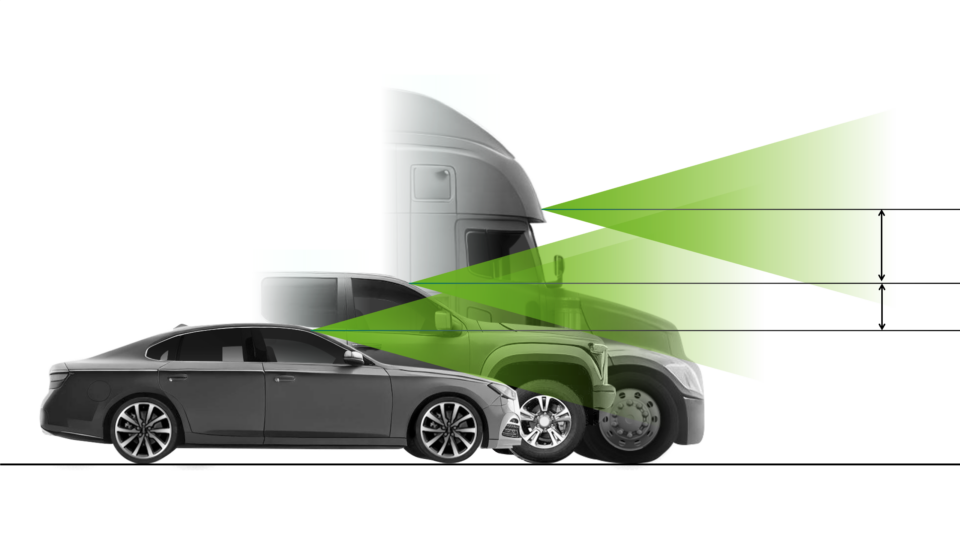
使用合成数据处理自动驾驶汽车感知
自动驾驶汽车 (AV) 有各种形状和大小,从小型客车到多轴半挂卡车不等。但是,部署在这些车辆上的感知算法必须经过训练,以处理类似情况,
2 MIN READ
使用合成数据处理自动驾驶汽车感知
2023年 11月 7日
借助 NVIDIA cuRobo 在几毫秒内生成 CUDA 加速的机器人动作
实时自主机器人导航由快速运动生成算法提供支持,可支持食品和服务、仓库自动化和机器租赁等多个行业的应用。机械手的运动生成极具挑战性,
1 MIN READ
借助 NVIDIA cuRobo 在几毫秒内生成 CUDA 加速的机器人动作
加载更多