Detailed Description
Parameters that control the initialization of RadarDopplerMotion module.
Definition at line 90 of file DopplerMotionEstimatorTypes.h.
Data Fields | |
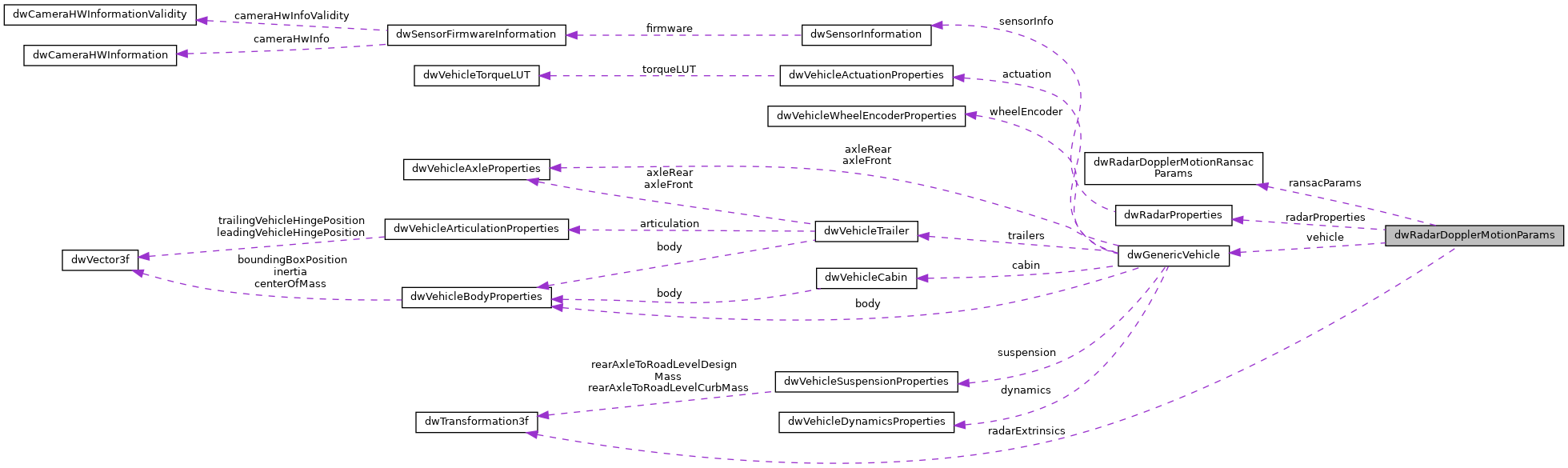
| dwRadarDopplerMotionRansacParams | ransacParams |
| Ransac parameters. More... | |
| dwRadarDopplerMotionImplType | radarMotionImplType |
| Implementation type. More... | |
| uint32_t | minNumReturns |
| Minimum number of radar returns required for a radar scan to be processed. More... | |
| dwRadarProperties | radarProperties |
| Radar properties. More... | |
| uint8_t | rangeSelection |
| bitfield selecting radar ranges used for doppler motion estimation. More... | |
| dwGenericVehicle | vehicle |
| Vehicle parameters. More... | |
| dwTransformation3f | radarExtrinsics |
| Radar extrinsics, transformation from Radar coordinate frame to vehicle rig coordinate frame. More... | |
Field Documentation
◆ minNumReturns
| uint32_t dwRadarDopplerMotionParams::minNumReturns |
Minimum number of radar returns required for a radar scan to be processed.
Definition at line 99 of file DopplerMotionEstimatorTypes.h.
◆ radarExtrinsics
| dwTransformation3f dwRadarDopplerMotionParams::radarExtrinsics |
Radar extrinsics, transformation from Radar coordinate frame to vehicle rig coordinate frame.
Definition at line 116 of file DopplerMotionEstimatorTypes.h.
◆ radarMotionImplType
| dwRadarDopplerMotionImplType dwRadarDopplerMotionParams::radarMotionImplType |
Implementation type.
Definition at line 96 of file DopplerMotionEstimatorTypes.h.
◆ radarProperties
| dwRadarProperties dwRadarDopplerMotionParams::radarProperties |
Radar properties.
Definition at line 102 of file DopplerMotionEstimatorTypes.h.
◆ rangeSelection
| uint8_t dwRadarDopplerMotionParams::rangeSelection |
bitfield selecting radar ranges used for doppler motion estimation.
- See also
dwRadarRangeenum value corresponds to bit position in bitfield, corresponding range will be used if bit is set example usage: rangeSelection = (1 << DW_RADAR_RANGE_SHORT) | (1 << DW_RADAR_RANGE_LONG); // use short and long range detections rangeSelection = 1 << DW_RADAR_RANGE_SHORT; // use short range detections
Definition at line 110 of file DopplerMotionEstimatorTypes.h.
◆ ransacParams
| dwRadarDopplerMotionRansacParams dwRadarDopplerMotionParams::ransacParams |
Ransac parameters.
Definition at line 93 of file DopplerMotionEstimatorTypes.h.
◆ vehicle
| dwGenericVehicle dwRadarDopplerMotionParams::vehicle |
Vehicle parameters.
Definition at line 113 of file DopplerMotionEstimatorTypes.h.
The documentation for this struct was generated from the following file: