Posts by Bingjie Tang
Robotics
Jul 11, 2024
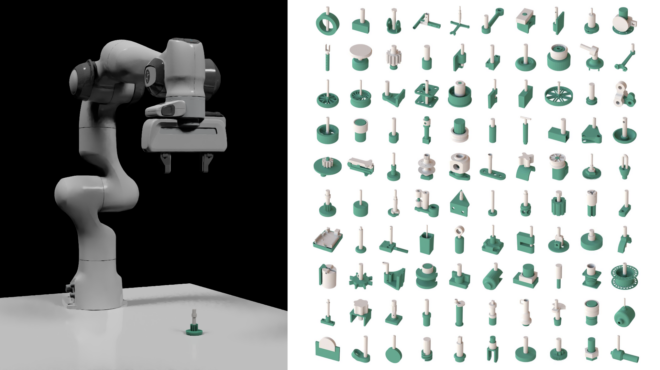
Training Sim-to-Real Transferable Robotic Assembly Skills over Diverse Geometries
Most objects in home and industrial settings consist of multiple parts that must be assembled. While human workers typically perform assembly, in certain...
10 MIN READ
Robotics
May 26, 2023
Transferring Industrial Robot Assembly Tasks from Simulation to Reality
Simulation is an essential tool for robots learning new skills. These skills include perception (understanding the world from camera images), planning...
10 MIN READ