Posts by Amey Kulkarni
Robotics
May 05, 2022
Developing and Deploying AI-powered Robots with NVIDIA Isaac Sim and NVIDIA TAO
From building cars to helping surgeons and delivering pizzas, robots not only automate but also speed up human tasks manyfold. With the advent of AI, you can...
12 MIN READ

Robotics
May 20, 2021
Accelerating AI Modules for ROS and ROS 2 on NVIDIA Jetson Platform
NVIDIA Jetson developer kits serve as a go-to platform for roboticists because of its ease of use, system support, and its comprehensive support for...
11 MIN READ

Robotics
Mar 23, 2021
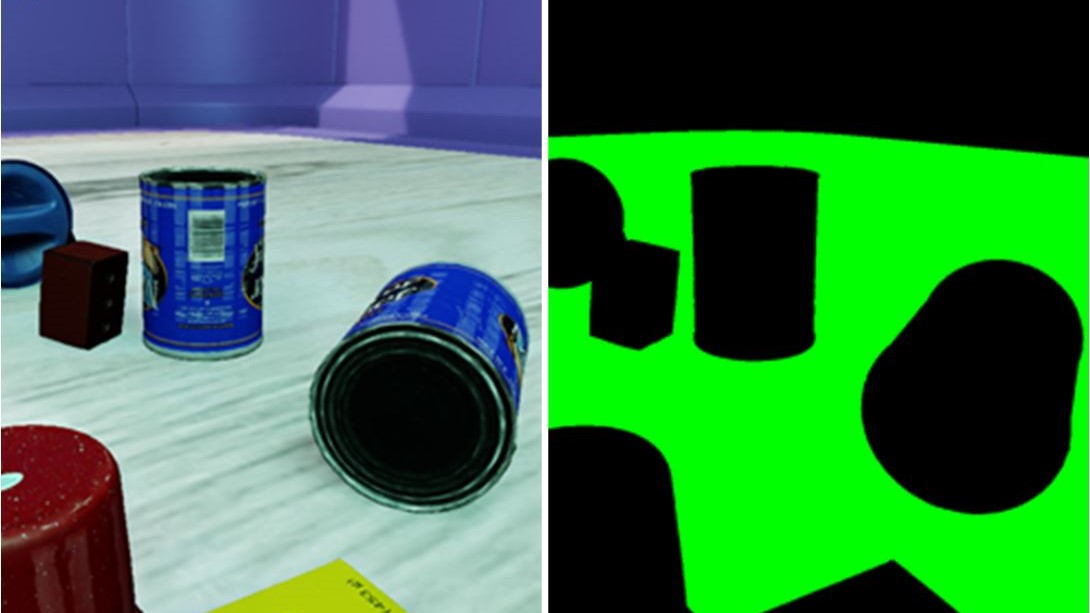
Training Your NVIDIA JetBot to Avoid Collisions Using NVIDIA Isaac Sim
Collecting a variety of data is important for AI model generalization. A good dataset consists of objects with different perspectives, backgrounds, colors, and...
10 MIN READ
Robotics
Nov 17, 2020
Implementing Robotics Applications with ROS 2 and AI on the NVIDIA Jetson Platform
Deep learning is being adopted in robotics to accurately navigate indoor environments, detect and follow objects of interest, and maneuver without collisions....
9 MIN READ
Computer Vision / Video Analytics
Aug 17, 2020
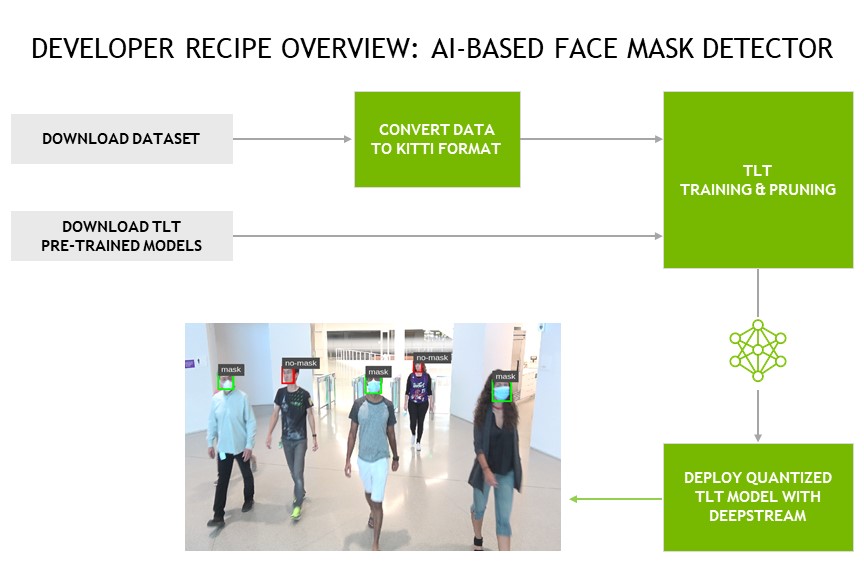
Implementing a Real-time, AI-Based, Face Mask Detector Application for COVID-19
Businesses are constantly overhauling their existing infrastructure and processes to be more efficient, safe, and usable for employees, customers, and...
10 MIN READ