Posts by Gautham Sholingar

Agentic AI / Generative AI
2025년 11월 7일
뉴럴 리컨스트럭션과 월드 파운데이션 모델을 활용해 자율주행 시뮬레이션 가속화
자율주행차(AV) 기술 스택은 기존의 모듈식 계층 구조에서, 파운데이션 모델 기반의 엔드 투 엔드 아키텍처로 진화하고 있습니다.
5 MIN READ
Computer Vision / Video Analytics
2023년 11월 22일
합성 데이터로 새로운 시각에서 안정적으로 자율 주행 차량 인식 활용하기
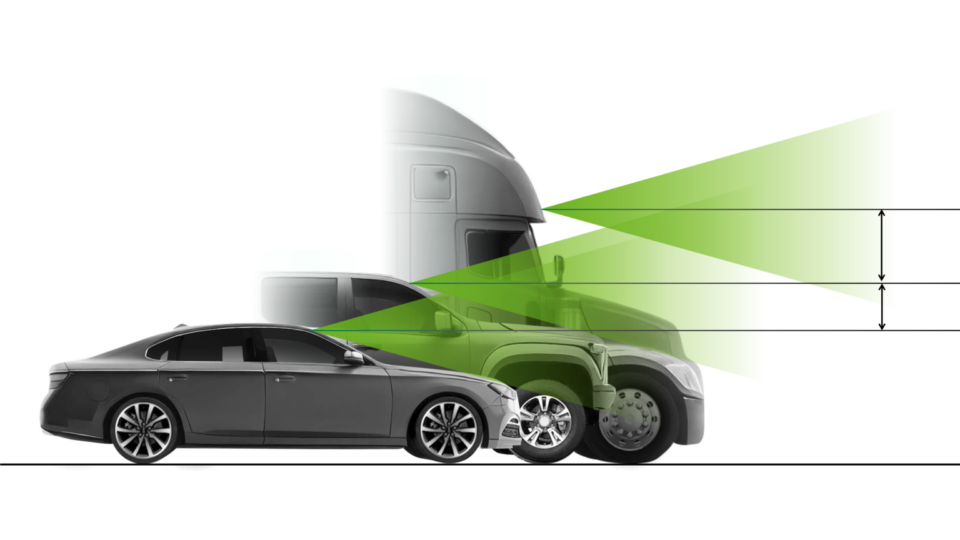
자율주행 차량(AV)은 소형 승용차부터 다축 세미트럭에 이르기까지 다양한 형태와 크기로 출시됩니다. 그러나 이러한 차량에 배포된 인식 알고리즘은…
4 MIN READ

Simulation / Modeling / Design
2023년 5월 24일
카메라 기반 AV 인식을 위한 합성 데이터로 원거리 피사체에 초점 맞추기
고속도로에서 자율주행 시스템이 안전하게 주행하기 위해서는 100m 이상 떨어진 차량과 같은 원거리 물체를 감지하는 것이 필수적입니다.
4 MIN READ