Detailed Description
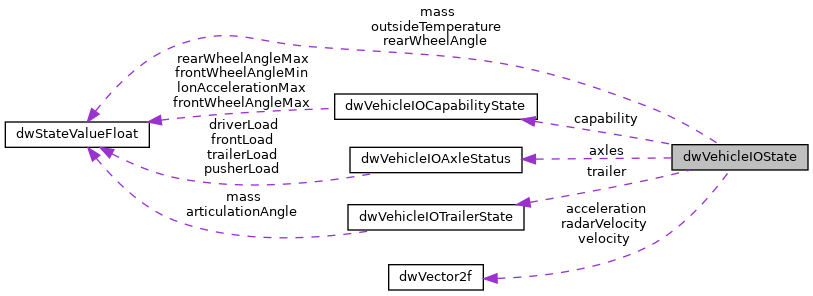
The vehicle IO state data. Fields only set if supported by VehicleIO driver.
Definition at line 852 of file VehicleIOLegacyStructures.h.
Data Fields | |
| dwVector2f | velocity |
| Vehicle velocity (longitudinal, lateral) measured in m/s at the rear axle. More... | |
| float32_t | speed |
| Signed norm of velocity vector. More... | |
| dwTime_t | speedTimestamp |
| Time at which speed was updated. More... | |
| dwVector2f | acceleration |
| Actual acceleration measured in m/s^2. More... | |
| dwTime_t | accelerationTimestamp |
| Time at which acceleration was updated. More... | |
| dwTime_t | steeringTimestamp |
| Time at which steering was updated. More... | |
| float32_t | steeringWheelAngle |
| Steering wheel angle (-10.0 to 10.0 +- 0.01rad) More... | |
| float32_t | steeringWheelAngleCmd |
| Last acknowledged steering wheel value from a command (-10.0 to 10.0 +- 0.01rad) More... | |
| float32_t | steeringWheelTorque |
| Steering wheel torque (0 to 10.0 +- 0.01 Nm) More... | |
| float32_t | inverseSteeringR |
| Inverse turning radius of the vehicle on the road. More... | |
| float32_t | frontSteeringAngleCmd |
| Last acknowledged front steering value from a command (-1.0 to 1.0 +- 0.01rad) More... | |
| float32_t | frontSteeringAngle |
| Same as inverseSteeringR described as an angle instead of radius [rad]. More... | |
| float32_t | throttleValue |
| Current thottle value as requested by a driver (0..1 +- 0.01 fraction of max pedal depressed, unitless) More... | |
| float32_t | throttleCmd |
| Last acknowledged throttle value from a command (0..1 +- 0.01 fraction of max pedal depressed, unitless) More... | |
| float32_t | throttleState |
| Throttle value in effect (0..1 +- 0.01 fraction of max pedal depressed, unitless) More... | |
| dwTime_t | throttleTimestamp |
| Time at which throttle was updated. More... | |
| float32_t | brakeValue |
| Current brake value as requested by a driver (0..1 +- 0.01 fraction of max pedal depressed, unitless) More... | |
| float32_t | brakeCmd |
| Last acknowledged brake value from a command (0..1 +- 0.01 fraction of max pedal depressed, unitless) More... | |
| float32_t | brakeState |
| Brake value in effect (0..1 +- 0.01 fraction of max pedal depressed, unitless) More... | |
| float32_t | brakeTorqueRequested |
| Requested value of brake torque (Nm) More... | |
| float32_t | brakeTorqueActual |
| Actual applied brake torque value (Nm) More... | |
| dwTime_t | brakeTimestamp |
| Time at which brake was updated. More... | |
| float32_t | wheelSpeed [DW_VEHICLE_NUM_WHEELS] |
| vehicle individual wheel speeds (rad/s) More... | |
| dwTime_t | wheelSpeedTimestamp [DW_VEHICLE_NUM_WHEELS] |
| vehicle individual timestamps of wheel speeds readings More... | |
| float32_t | suspension [DW_VEHICLE_NUM_WHEELS] |
| Vehicle Suspension data, levels relative to a calibration instant [m]. More... | |
| dwTime_t | suspensionTimestamp [DW_VEHICLE_NUM_WHEELS] |
| Vehicle timestamps of Suspension data. More... | |
| int16_t | wheelPosition [DW_VEHICLE_NUM_WHEELS] |
| Vehicle Wheel Position counters. More... | |
| dwTime_t | wheelPositionTimestamp [DW_VEHICLE_NUM_WHEELS] |
| individual timestamps of wheel position readings More... | |
| dwVehicleIOWheelTicksDirection | wheelTicksDirection [DW_VEHICLE_NUM_WHEELS] |
| Wheel rotation direction. More... | |
| float32_t | tirePressure [DW_VEHICLE_NUM_WHEELS] |
| Vehicle tire pressure data. More... | |
| bool | buttonCruiseControlOnOff |
| bool | buttonCruiseControlReset |
| bool | buttonCruiseControlCancel |
| bool | buttonCruiseControlResetCancel |
| bool | buttonCruiseControlIncrement |
| bool | buttonCruiseControlDecrement |
| bool | buttonCruiseControlGapIncrement |
| bool | buttonCruiseControlGapDecrement |
| bool | buttonLaneAssistOnOff |
| bool | doorDriver |
| bool | doorPassenger |
| bool | doorRearLeft |
| bool | doorRearRight |
| bool | doorHood |
| bool | doorTrunk |
| bool | passengerDetect |
| bool | passengerAirbag |
| bool | buckleDriver |
| bool | bucklePassenger |
| bool | highBeamHeadlights |
| bool | wiper |
| bool | buttonLeftKeypadOk |
| bool | buttonLeftKeypadUp |
| bool | buttonLeftKeypadDown |
| bool | buttonTimeGapCycle |
| bool | handsOnWheel |
| float32_t | fuelLevel |
| (0 to 1 +- 0.01 fraction of tank volume, unitless) More... | |
| dwVehicleIOGear | gear |
| Vehicle gear. More... | |
| dwVehicleIOGear | gearCmd |
| Last acknowledged gear from a command. More... | |
| dwVehicleIOTurnSignal | turnSignal |
| Turn signal value. More... | |
| uint32_t | overrides |
| Overrides in place (0 = none). More... | |
| uint32_t | faults |
| Faults detected (0 = none). More... | |
| dwVehicleIODrivingMode | drivingMode |
| dwVehicleIOLatMode | latMode |
| dwVehicleIOLonMode | lonMode |
| bool | enabled |
| bool | brakeEnabled |
| Brake by-wire enablement reported by vehicle. More... | |
| bool | throttleEnabled |
| Throttle by-wire enablement reported by vehicle. More... | |
| bool | steeringEnabled |
| Steering by-wire enablement reported by vehicle. More... | |
| float32_t | rearAxleCurvature |
| Path curvature [1/m]. More... | |
| bool | rearAxleCurvatureValid |
| True if rear axle curvature is valid. More... | |
| dwTime_t | rearAxleCurvatureTimestamp |
| Timestamp for all motion signals. More... | |
| dwStateValueFloat | rearWheelAngle |
| dwVehicleIOCapabilityState | capability |
| Rear wheel angle on road. More... | |
| dwVector2f | radarVelocity |
| Reported velocity from radar unit(s) More... | |
| dwTime_t | radarVelocityTimestamp |
| dwTime_t | engineSpeedTimestamp |
| engine speed timestamp[us] More... | |
| float32_t | engineSpeed |
| engine rpm speed [RPM] More... | |
| dwStateValueFloat | outsideTemperature |
| outside temperature [degrees C] More... | |
| dwStateValueFloat | mass |
| Total mass of vehicle [kg]. More... | |
| dwVehicleIOSignalQuality | speedQuality |
| Speed and velocity signal quality (legacy, protobuf backward compatible) More... | |
| dwVehicleIOTrailerState | trailer |
| dwVehicleIOAxleStatus | axles |
| float32_t | brakeTorqueDriver |
| Brake torque requested by driver via physical pedal (Nm) More... | |
| bool | brakeActive |
| True if braking system is actively applying brakes. More... | |
| bool | brakePedalPressed |
| True if the brake pedal has been pressed (note that the brake system can be active without a pedal press) More... | |
| dwVehicleIOLatCtrlLoopStatus | latCtrlLoopStatus |
| lateral control loop state More... | |
| dwVehicleIOSpeedDirectionESC | speedDirectionESC |
| ESC Longitudinal Speed Direction. More... | |
| dwVehicleIOTirePressureMonitoringState | tirePressureMonitoringState |
| Tire Pressure Monitoring System Status. More... | |
| dwVehicleIOIgnitionStatus | ignitionStatus |
| Status of vehicle ignition. More... | |
| dwVehicleIOESCOperationalState | ESCOperationalState |
| ESC Operational State. More... | |
| dwVehicleIOAbsIntervention | absIntervention |
| ABS/ESP Status. More... | |
| float32_t | latCtrlCurvCapMax [DW_VEHICLEIO_NUM_LAT_CTRL_CURV_CAP] |
| Maximum curvature capability the vehicle is capable of at various velocities in L2/L3 mode. More... | |
| float32_t | latCtrlCurvCapMin [DW_VEHICLEIO_NUM_LAT_CTRL_CURV_CAP] |
| Minumum (asymetric) curvature capability the vehicle is capable of at various velocities in L2/L3 mode. More... | |
| dwVehicleIODrivePositionTarget | drivePositionTarget |
| Drive Position that will be shifted to (PRND). More... | |
| dwVehicleIOVehicleStopped | vehicleStopped |
| Vehicle in Standstill as detected by ESC. More... | |
| dwVehicleIOFrontSteeringAngleQuality | frontSteeringAngleQuality |
| Current front axle angle status. More... | |
| dwTime_t | timestamp_us |
| Timestamp when dwVehicleIOState was assembled. More... | |
| dwVehicleIOHoldStatus | holdStatus |
| Parking brake / hold state report. More... | |
| float32_t | speedMin |
| Lower bound of vehicle velocity in the longitudinal direction as measured by ESP. More... | |
| float32_t | speedMax |
| Higher bound of vehicle velocity in the longitudinal direction as measured by ESP. More... | |
| dwVehicleIOLongCtrlEcoAssistStatus | ecoAssistStatus |
| dwVehicleIOMirrorFoldState | mirrorFoldState [2] |
| 0 - corresponds to the left mirror and 1 - to the right one. More... | |
| float32_t | steeringWheelAngleSpeed |
| Time Derivative of Steering Wheel Angle. More... | |
| bool | wetnessLevelUnfilteredValid |
| true if wetness level unfiltered is valid More... | |
| bool | wetnessLevelFilteredValid |
| true if wetness level filtered is valid More... | |
| uint8_t | wetnessLevelUnfiltered |
| Wetness level unfiltered. More... | |
| uint8_t | wetnessLevelFiltered |
| Wetness level robust/filtered and therefore slower one. More... | |
Field Documentation
◆ absIntervention
| dwVehicleIOAbsIntervention dwVehicleIOState::absIntervention |
ABS/ESP Status.
Definition at line 947 of file VehicleIOLegacyStructures.h.
◆ acceleration
| dwVector2f dwVehicleIOState::acceleration |
Actual acceleration measured in m/s^2.
Definition at line 857 of file VehicleIOLegacyStructures.h.
◆ accelerationTimestamp
| dwTime_t dwVehicleIOState::accelerationTimestamp |
Time at which acceleration was updated.
Definition at line 858 of file VehicleIOLegacyStructures.h.
◆ axles
| dwVehicleIOAxleStatus dwVehicleIOState::axles |
Definition at line 938 of file VehicleIOLegacyStructures.h.
◆ brakeActive
| bool dwVehicleIOState::brakeActive |
True if braking system is actively applying brakes.
Definition at line 940 of file VehicleIOLegacyStructures.h.
◆ brakeCmd
| float32_t dwVehicleIOState::brakeCmd |
Last acknowledged brake value from a command (0..1 +- 0.01 fraction of max pedal depressed, unitless)
Definition at line 871 of file VehicleIOLegacyStructures.h.
◆ brakeEnabled
| bool dwVehicleIOState::brakeEnabled |
Brake by-wire enablement reported by vehicle.
Definition at line 922 of file VehicleIOLegacyStructures.h.
◆ brakePedalPressed
| bool dwVehicleIOState::brakePedalPressed |
True if the brake pedal has been pressed (note that the brake system can be active without a pedal press)
Definition at line 941 of file VehicleIOLegacyStructures.h.
◆ brakeState
| float32_t dwVehicleIOState::brakeState |
Brake value in effect (0..1 +- 0.01 fraction of max pedal depressed, unitless)
Definition at line 872 of file VehicleIOLegacyStructures.h.
◆ brakeTimestamp
| dwTime_t dwVehicleIOState::brakeTimestamp |
Time at which brake was updated.
Definition at line 875 of file VehicleIOLegacyStructures.h.
◆ brakeTorqueActual
| float32_t dwVehicleIOState::brakeTorqueActual |
Actual applied brake torque value (Nm)
Definition at line 874 of file VehicleIOLegacyStructures.h.
◆ brakeTorqueDriver
| float32_t dwVehicleIOState::brakeTorqueDriver |
Brake torque requested by driver via physical pedal (Nm)
Definition at line 939 of file VehicleIOLegacyStructures.h.
◆ brakeTorqueRequested
| float32_t dwVehicleIOState::brakeTorqueRequested |
Requested value of brake torque (Nm)
Definition at line 873 of file VehicleIOLegacyStructures.h.
◆ brakeValue
| float32_t dwVehicleIOState::brakeValue |
Current brake value as requested by a driver (0..1 +- 0.01 fraction of max pedal depressed, unitless)
Definition at line 870 of file VehicleIOLegacyStructures.h.
◆ buckleDriver
| bool dwVehicleIOState::buckleDriver |
Definition at line 903 of file VehicleIOLegacyStructures.h.
◆ bucklePassenger
| bool dwVehicleIOState::bucklePassenger |
Definition at line 904 of file VehicleIOLegacyStructures.h.
◆ buttonCruiseControlCancel
| bool dwVehicleIOState::buttonCruiseControlCancel |
Definition at line 888 of file VehicleIOLegacyStructures.h.
◆ buttonCruiseControlDecrement
| bool dwVehicleIOState::buttonCruiseControlDecrement |
Definition at line 891 of file VehicleIOLegacyStructures.h.
◆ buttonCruiseControlGapDecrement
| bool dwVehicleIOState::buttonCruiseControlGapDecrement |
Definition at line 893 of file VehicleIOLegacyStructures.h.
◆ buttonCruiseControlGapIncrement
| bool dwVehicleIOState::buttonCruiseControlGapIncrement |
Definition at line 892 of file VehicleIOLegacyStructures.h.
◆ buttonCruiseControlIncrement
| bool dwVehicleIOState::buttonCruiseControlIncrement |
Definition at line 890 of file VehicleIOLegacyStructures.h.
◆ buttonCruiseControlOnOff
| bool dwVehicleIOState::buttonCruiseControlOnOff |
Definition at line 886 of file VehicleIOLegacyStructures.h.
◆ buttonCruiseControlReset
| bool dwVehicleIOState::buttonCruiseControlReset |
Definition at line 887 of file VehicleIOLegacyStructures.h.
◆ buttonCruiseControlResetCancel
| bool dwVehicleIOState::buttonCruiseControlResetCancel |
Definition at line 889 of file VehicleIOLegacyStructures.h.
◆ buttonLaneAssistOnOff
| bool dwVehicleIOState::buttonLaneAssistOnOff |
Definition at line 894 of file VehicleIOLegacyStructures.h.
◆ buttonLeftKeypadDown
| bool dwVehicleIOState::buttonLeftKeypadDown |
Definition at line 909 of file VehicleIOLegacyStructures.h.
◆ buttonLeftKeypadOk
| bool dwVehicleIOState::buttonLeftKeypadOk |
Definition at line 907 of file VehicleIOLegacyStructures.h.
◆ buttonLeftKeypadUp
| bool dwVehicleIOState::buttonLeftKeypadUp |
Definition at line 908 of file VehicleIOLegacyStructures.h.
◆ buttonTimeGapCycle
| bool dwVehicleIOState::buttonTimeGapCycle |
Definition at line 910 of file VehicleIOLegacyStructures.h.
◆ capability
| dwVehicleIOCapabilityState dwVehicleIOState::capability |
Rear wheel angle on road.
Definition at line 929 of file VehicleIOLegacyStructures.h.
◆ doorDriver
| bool dwVehicleIOState::doorDriver |
Definition at line 895 of file VehicleIOLegacyStructures.h.
◆ doorHood
| bool dwVehicleIOState::doorHood |
Definition at line 899 of file VehicleIOLegacyStructures.h.
◆ doorPassenger
| bool dwVehicleIOState::doorPassenger |
Definition at line 896 of file VehicleIOLegacyStructures.h.
◆ doorRearLeft
| bool dwVehicleIOState::doorRearLeft |
Definition at line 897 of file VehicleIOLegacyStructures.h.
◆ doorRearRight
| bool dwVehicleIOState::doorRearRight |
Definition at line 898 of file VehicleIOLegacyStructures.h.
◆ doorTrunk
| bool dwVehicleIOState::doorTrunk |
Definition at line 900 of file VehicleIOLegacyStructures.h.
◆ drivePositionTarget
| dwVehicleIODrivePositionTarget dwVehicleIOState::drivePositionTarget |
Drive Position that will be shifted to (PRND).
Definition at line 950 of file VehicleIOLegacyStructures.h.
◆ drivingMode
| dwVehicleIODrivingMode dwVehicleIOState::drivingMode |
Definition at line 918 of file VehicleIOLegacyStructures.h.
◆ ecoAssistStatus
| dwVehicleIOLongCtrlEcoAssistStatus dwVehicleIOState::ecoAssistStatus |
Definition at line 957 of file VehicleIOLegacyStructures.h.
◆ enabled
| bool dwVehicleIOState::enabled |
Definition at line 921 of file VehicleIOLegacyStructures.h.
◆ engineSpeed
| float32_t dwVehicleIOState::engineSpeed |
engine rpm speed [RPM]
Definition at line 933 of file VehicleIOLegacyStructures.h.
◆ engineSpeedTimestamp
| dwTime_t dwVehicleIOState::engineSpeedTimestamp |
engine speed timestamp[us]
Definition at line 932 of file VehicleIOLegacyStructures.h.
◆ ESCOperationalState
| dwVehicleIOESCOperationalState dwVehicleIOState::ESCOperationalState |
ESC Operational State.
Definition at line 946 of file VehicleIOLegacyStructures.h.
◆ faults
| uint32_t dwVehicleIOState::faults |
Faults detected (0 = none).
Flags defined in dwVehicleIOFaults
Definition at line 917 of file VehicleIOLegacyStructures.h.
◆ frontSteeringAngle
| float32_t dwVehicleIOState::frontSteeringAngle |
Same as inverseSteeringR described as an angle instead of radius [rad].
Definition at line 865 of file VehicleIOLegacyStructures.h.
◆ frontSteeringAngleCmd
| float32_t dwVehicleIOState::frontSteeringAngleCmd |
Last acknowledged front steering value from a command (-1.0 to 1.0 +- 0.01rad)
Definition at line 864 of file VehicleIOLegacyStructures.h.
◆ frontSteeringAngleQuality
| dwVehicleIOFrontSteeringAngleQuality dwVehicleIOState::frontSteeringAngleQuality |
Current front axle angle status.
Definition at line 952 of file VehicleIOLegacyStructures.h.
◆ fuelLevel
| float32_t dwVehicleIOState::fuelLevel |
(0 to 1 +- 0.01 fraction of tank volume, unitless)
Definition at line 912 of file VehicleIOLegacyStructures.h.
◆ gear
| dwVehicleIOGear dwVehicleIOState::gear |
Vehicle gear.
Definition at line 913 of file VehicleIOLegacyStructures.h.
◆ gearCmd
| dwVehicleIOGear dwVehicleIOState::gearCmd |
Last acknowledged gear from a command.
Definition at line 914 of file VehicleIOLegacyStructures.h.
◆ handsOnWheel
| bool dwVehicleIOState::handsOnWheel |
Definition at line 911 of file VehicleIOLegacyStructures.h.
◆ highBeamHeadlights
| bool dwVehicleIOState::highBeamHeadlights |
Definition at line 905 of file VehicleIOLegacyStructures.h.
◆ holdStatus
| dwVehicleIOHoldStatus dwVehicleIOState::holdStatus |
Parking brake / hold state report.
Definition at line 954 of file VehicleIOLegacyStructures.h.
◆ ignitionStatus
| dwVehicleIOIgnitionStatus dwVehicleIOState::ignitionStatus |
Status of vehicle ignition.
Definition at line 945 of file VehicleIOLegacyStructures.h.
◆ inverseSteeringR
| float32_t dwVehicleIOState::inverseSteeringR |
Inverse turning radius of the vehicle on the road.
The radius depends on the vehicle wheel base, steering wheel angle, drivetrain properties and current speed.
Definition at line 863 of file VehicleIOLegacyStructures.h.
◆ latCtrlCurvCapMax
| float32_t dwVehicleIOState::latCtrlCurvCapMax[DW_VEHICLEIO_NUM_LAT_CTRL_CURV_CAP] |
Maximum curvature capability the vehicle is capable of at various velocities in L2/L3 mode.
Communicated as a vector.
Definition at line 948 of file VehicleIOLegacyStructures.h.
◆ latCtrlCurvCapMin
| float32_t dwVehicleIOState::latCtrlCurvCapMin[DW_VEHICLEIO_NUM_LAT_CTRL_CURV_CAP] |
Minumum (asymetric) curvature capability the vehicle is capable of at various velocities in L2/L3 mode.
Communicated as a vector.
Definition at line 949 of file VehicleIOLegacyStructures.h.
◆ latCtrlLoopStatus
| dwVehicleIOLatCtrlLoopStatus dwVehicleIOState::latCtrlLoopStatus |
lateral control loop state
Definition at line 942 of file VehicleIOLegacyStructures.h.
◆ latMode
| dwVehicleIOLatMode dwVehicleIOState::latMode |
Definition at line 919 of file VehicleIOLegacyStructures.h.
◆ lonMode
| dwVehicleIOLonMode dwVehicleIOState::lonMode |
Definition at line 920 of file VehicleIOLegacyStructures.h.
◆ mass
| dwStateValueFloat dwVehicleIOState::mass |
Total mass of vehicle [kg].
Definition at line 935 of file VehicleIOLegacyStructures.h.
◆ mirrorFoldState
| dwVehicleIOMirrorFoldState dwVehicleIOState::mirrorFoldState[2] |
0 - corresponds to the left mirror and 1 - to the right one.
Definition at line 958 of file VehicleIOLegacyStructures.h.
◆ outsideTemperature
| dwStateValueFloat dwVehicleIOState::outsideTemperature |
outside temperature [degrees C]
Definition at line 934 of file VehicleIOLegacyStructures.h.
◆ overrides
| uint32_t dwVehicleIOState::overrides |
Overrides in place (0 = none).
Flags defined in dwVehicleIOOverrides
Definition at line 916 of file VehicleIOLegacyStructures.h.
◆ passengerAirbag
| bool dwVehicleIOState::passengerAirbag |
Definition at line 902 of file VehicleIOLegacyStructures.h.
◆ passengerDetect
| bool dwVehicleIOState::passengerDetect |
Definition at line 901 of file VehicleIOLegacyStructures.h.
◆ radarVelocity
| dwVector2f dwVehicleIOState::radarVelocity |
Reported velocity from radar unit(s)
Definition at line 930 of file VehicleIOLegacyStructures.h.
◆ radarVelocityTimestamp
| dwTime_t dwVehicleIOState::radarVelocityTimestamp |
Definition at line 931 of file VehicleIOLegacyStructures.h.
◆ rearAxleCurvature
| float32_t dwVehicleIOState::rearAxleCurvature |
Path curvature [1/m].
Definition at line 925 of file VehicleIOLegacyStructures.h.
◆ rearAxleCurvatureTimestamp
| dwTime_t dwVehicleIOState::rearAxleCurvatureTimestamp |
Timestamp for all motion signals.
Definition at line 927 of file VehicleIOLegacyStructures.h.
◆ rearAxleCurvatureValid
| bool dwVehicleIOState::rearAxleCurvatureValid |
True if rear axle curvature is valid.
Definition at line 926 of file VehicleIOLegacyStructures.h.
◆ rearWheelAngle
| dwStateValueFloat dwVehicleIOState::rearWheelAngle |
Definition at line 928 of file VehicleIOLegacyStructures.h.
◆ speed
| float32_t dwVehicleIOState::speed |
Signed norm of velocity vector.
Definition at line 855 of file VehicleIOLegacyStructures.h.
◆ speedDirectionESC
| dwVehicleIOSpeedDirectionESC dwVehicleIOState::speedDirectionESC |
ESC Longitudinal Speed Direction.
Definition at line 943 of file VehicleIOLegacyStructures.h.
◆ speedMax
| float32_t dwVehicleIOState::speedMax |
Higher bound of vehicle velocity in the longitudinal direction as measured by ESP.
Definition at line 956 of file VehicleIOLegacyStructures.h.
◆ speedMin
| float32_t dwVehicleIOState::speedMin |
Lower bound of vehicle velocity in the longitudinal direction as measured by ESP.
Definition at line 955 of file VehicleIOLegacyStructures.h.
◆ speedQuality
| dwVehicleIOSignalQuality dwVehicleIOState::speedQuality |
Speed and velocity signal quality (legacy, protobuf backward compatible)
Definition at line 936 of file VehicleIOLegacyStructures.h.
◆ speedTimestamp
| dwTime_t dwVehicleIOState::speedTimestamp |
Time at which speed was updated.
Definition at line 856 of file VehicleIOLegacyStructures.h.
◆ steeringEnabled
| bool dwVehicleIOState::steeringEnabled |
Steering by-wire enablement reported by vehicle.
Definition at line 924 of file VehicleIOLegacyStructures.h.
◆ steeringTimestamp
| dwTime_t dwVehicleIOState::steeringTimestamp |
Time at which steering was updated.
Definition at line 859 of file VehicleIOLegacyStructures.h.
◆ steeringWheelAngle
| float32_t dwVehicleIOState::steeringWheelAngle |
Steering wheel angle (-10.0 to 10.0 +- 0.01rad)
Definition at line 860 of file VehicleIOLegacyStructures.h.
◆ steeringWheelAngleCmd
| float32_t dwVehicleIOState::steeringWheelAngleCmd |
Last acknowledged steering wheel value from a command (-10.0 to 10.0 +- 0.01rad)
Definition at line 861 of file VehicleIOLegacyStructures.h.
◆ steeringWheelAngleSpeed
| float32_t dwVehicleIOState::steeringWheelAngleSpeed |
Time Derivative of Steering Wheel Angle.
Definition at line 961 of file VehicleIOLegacyStructures.h.
◆ steeringWheelTorque
| float32_t dwVehicleIOState::steeringWheelTorque |
Steering wheel torque (0 to 10.0 +- 0.01 Nm)
Definition at line 862 of file VehicleIOLegacyStructures.h.
◆ suspension
| float32_t dwVehicleIOState::suspension[DW_VEHICLE_NUM_WHEELS] |
Vehicle Suspension data, levels relative to a calibration instant [m].
Definition at line 878 of file VehicleIOLegacyStructures.h.
◆ suspensionTimestamp
| dwTime_t dwVehicleIOState::suspensionTimestamp[DW_VEHICLE_NUM_WHEELS] |
Vehicle timestamps of Suspension data.
Definition at line 879 of file VehicleIOLegacyStructures.h.
◆ throttleCmd
| float32_t dwVehicleIOState::throttleCmd |
Last acknowledged throttle value from a command (0..1 +- 0.01 fraction of max pedal depressed, unitless)
Definition at line 867 of file VehicleIOLegacyStructures.h.
◆ throttleEnabled
| bool dwVehicleIOState::throttleEnabled |
Throttle by-wire enablement reported by vehicle.
Definition at line 923 of file VehicleIOLegacyStructures.h.
◆ throttleState
| float32_t dwVehicleIOState::throttleState |
Throttle value in effect (0..1 +- 0.01 fraction of max pedal depressed, unitless)
Definition at line 868 of file VehicleIOLegacyStructures.h.
◆ throttleTimestamp
| dwTime_t dwVehicleIOState::throttleTimestamp |
Time at which throttle was updated.
Definition at line 869 of file VehicleIOLegacyStructures.h.
◆ throttleValue
| float32_t dwVehicleIOState::throttleValue |
Current thottle value as requested by a driver (0..1 +- 0.01 fraction of max pedal depressed, unitless)
Definition at line 866 of file VehicleIOLegacyStructures.h.
◆ timestamp_us
| dwTime_t dwVehicleIOState::timestamp_us |
Timestamp when dwVehicleIOState was assembled.
Definition at line 953 of file VehicleIOLegacyStructures.h.
◆ tirePressure
| float32_t dwVehicleIOState::tirePressure[DW_VEHICLE_NUM_WHEELS] |
Vehicle tire pressure data.
Definition at line 883 of file VehicleIOLegacyStructures.h.
◆ tirePressureMonitoringState
| dwVehicleIOTirePressureMonitoringState dwVehicleIOState::tirePressureMonitoringState |
Tire Pressure Monitoring System Status.
Definition at line 944 of file VehicleIOLegacyStructures.h.
◆ trailer
| dwVehicleIOTrailerState dwVehicleIOState::trailer |
Definition at line 937 of file VehicleIOLegacyStructures.h.
◆ turnSignal
| dwVehicleIOTurnSignal dwVehicleIOState::turnSignal |
Turn signal value.
Definition at line 915 of file VehicleIOLegacyStructures.h.
◆ vehicleStopped
| dwVehicleIOVehicleStopped dwVehicleIOState::vehicleStopped |
Vehicle in Standstill as detected by ESC.
Definition at line 951 of file VehicleIOLegacyStructures.h.
◆ velocity
| dwVector2f dwVehicleIOState::velocity |
Vehicle velocity (longitudinal, lateral) measured in m/s at the rear axle.
Definition at line 854 of file VehicleIOLegacyStructures.h.
◆ wetnessLevelFiltered
| uint8_t dwVehicleIOState::wetnessLevelFiltered |
Wetness level robust/filtered and therefore slower one.
Definition at line 965 of file VehicleIOLegacyStructures.h.
◆ wetnessLevelFilteredValid
| bool dwVehicleIOState::wetnessLevelFilteredValid |
true if wetness level filtered is valid
Definition at line 963 of file VehicleIOLegacyStructures.h.
◆ wetnessLevelUnfiltered
| uint8_t dwVehicleIOState::wetnessLevelUnfiltered |
Wetness level unfiltered.
Definition at line 964 of file VehicleIOLegacyStructures.h.
◆ wetnessLevelUnfilteredValid
| bool dwVehicleIOState::wetnessLevelUnfilteredValid |
true if wetness level unfiltered is valid
Definition at line 962 of file VehicleIOLegacyStructures.h.
◆ wheelPosition
| int16_t dwVehicleIOState::wheelPosition[DW_VEHICLE_NUM_WHEELS] |
Vehicle Wheel Position counters.
The counters are subject to roll-over. Actual wheel travel distance depends on wheel radius, which requires calibration.
Definition at line 880 of file VehicleIOLegacyStructures.h.
◆ wheelPositionTimestamp
| dwTime_t dwVehicleIOState::wheelPositionTimestamp[DW_VEHICLE_NUM_WHEELS] |
individual timestamps of wheel position readings
Definition at line 881 of file VehicleIOLegacyStructures.h.
◆ wheelSpeed
| float32_t dwVehicleIOState::wheelSpeed[DW_VEHICLE_NUM_WHEELS] |
vehicle individual wheel speeds (rad/s)
Definition at line 876 of file VehicleIOLegacyStructures.h.
◆ wheelSpeedTimestamp
| dwTime_t dwVehicleIOState::wheelSpeedTimestamp[DW_VEHICLE_NUM_WHEELS] |
vehicle individual timestamps of wheel speeds readings
Definition at line 877 of file VehicleIOLegacyStructures.h.
◆ wheelTicksDirection
| dwVehicleIOWheelTicksDirection dwVehicleIOState::wheelTicksDirection[DW_VEHICLE_NUM_WHEELS] |
Wheel rotation direction.
Definition at line 882 of file VehicleIOLegacyStructures.h.
◆ wiper
| bool dwVehicleIOState::wiper |
Definition at line 906 of file VehicleIOLegacyStructures.h.
The documentation for this struct was generated from the following file: