dwLidarPointCloud Struct Reference
Detailed Description
Defines a LIDAR-specific point cloud data structure.
Definition at line 80 of file LidarPointCloud.h.
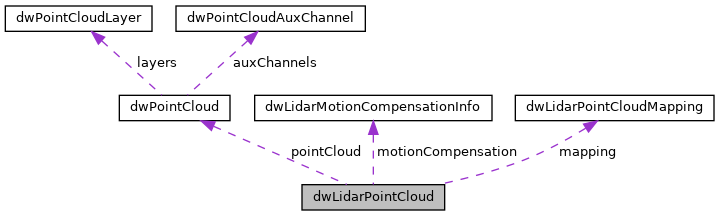
Collaboration diagram for dwLidarPointCloud:
Data Fields | |
| uint32_t | userData [DW_LIDAR_POINT_CLOUD_USER_DATA_SIZE] |
| User defined data. More... | |
| dwPointCloud | pointCloud |
| Wrapped point cloud. More... | |
| dwLidarPointCloudMapping | mapping |
| Mapping of returns and aux channels. More... | |
| dwPointCloudReferenceFrame | coordinateFrame |
| Coordinate reference frame for the data in this pointcloud. More... | |
| dwLidarMotionCompensationInfo | motionCompensation |
| Motion compensation information. More... | |
Field Documentation
◆ coordinateFrame
| dwPointCloudReferenceFrame dwLidarPointCloud::coordinateFrame |
Coordinate reference frame for the data in this pointcloud.
Definition at line 89 of file LidarPointCloud.h.
◆ mapping
| dwLidarPointCloudMapping dwLidarPointCloud::mapping |
Mapping of returns and aux channels.
Definition at line 87 of file LidarPointCloud.h.
◆ motionCompensation
| dwLidarMotionCompensationInfo dwLidarPointCloud::motionCompensation |
Motion compensation information.
Definition at line 91 of file LidarPointCloud.h.
◆ pointCloud
| dwPointCloud dwLidarPointCloud::pointCloud |
Wrapped point cloud.
Definition at line 85 of file LidarPointCloud.h.
◆ userData
| uint32_t dwLidarPointCloud::userData[DW_LIDAR_POINT_CLOUD_USER_DATA_SIZE] |
User defined data.
Definition at line 83 of file LidarPointCloud.h.
The documentation for this struct was generated from the following file: