Detailed Description
Defines point cloud data structure.
Definition at line 80 of file PointCloud.h.
Data Fields | |
| dwMemoryType | type |
| Defines type of a memory GPU or CPU. More... | |
| dwPointCloudFormat | format |
| Format of a buffer. More... | |
| bool | organized |
| Flag indicating the data is ordered on the 3D grid. More... | |
| dwTime_t | timestamp |
| Time when the point cloud capturing is finished on sensor (deprecated) More... | |
| dwTime_t | sensorStartTimestamp |
| Point cloud start sensor timestamp. More... | |
| dwTime_t | sensorEndTimestamp |
| Point cloud end sensor timestamp. More... | |
| void * | points |
| Pointer to memory buffer of all points. More... | |
| uint32_t | capacity |
| numLayers * maxPointsPerLayer More... | |
| uint32_t | size |
| Number of points in the cloud including all layers. More... | |
| dwTime_t | hostStartTimestamp |
| Point cloud start host timestamp. More... | |
| dwTime_t | hostEndTimestamp |
| Point cloud end host timestamp. More... | |
| uint32_t | maxPointsPerLayer |
| Maximum number of points in layer (use even number of points to benefit from aligned memory access per layer if each point is 16 bytes long) More... | |
| uint32_t | numLayers |
| Number of layers in a point cloud. More... | |
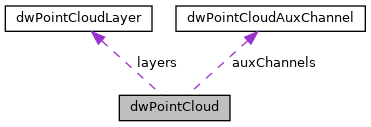
| dwPointCloudLayer | layers [DW_POINT_CLOUD_MAX_LAYERS] |
| uint32_t | numAuxChannels |
| Number of aux channels in a point cloud. More... | |
| dwPointCloudAuxChannel | auxChannels [DW_POINT_CLOUD_MAX_AUX_CHANNELS] |
Field Documentation
◆ auxChannels
| dwPointCloudAuxChannel dwPointCloud::auxChannels[DW_POINT_CLOUD_MAX_AUX_CHANNELS] |
Definition at line 103 of file PointCloud.h.
◆ capacity
| uint32_t dwPointCloud::capacity |
numLayers * maxPointsPerLayer
Definition at line 92 of file PointCloud.h.
◆ format
| dwPointCloudFormat dwPointCloud::format |
Format of a buffer.
Definition at line 83 of file PointCloud.h.
◆ hostEndTimestamp
| dwTime_t dwPointCloud::hostEndTimestamp |
Point cloud end host timestamp.
Definition at line 96 of file PointCloud.h.
◆ hostStartTimestamp
| dwTime_t dwPointCloud::hostStartTimestamp |
Point cloud start host timestamp.
Definition at line 95 of file PointCloud.h.
◆ layers
| dwPointCloudLayer dwPointCloud::layers[DW_POINT_CLOUD_MAX_LAYERS] |
Definition at line 100 of file PointCloud.h.
◆ maxPointsPerLayer
| uint32_t dwPointCloud::maxPointsPerLayer |
Maximum number of points in layer (use even number of points to benefit from aligned memory access per layer if each point is 16 bytes long)
Definition at line 98 of file PointCloud.h.
◆ numAuxChannels
| uint32_t dwPointCloud::numAuxChannels |
Number of aux channels in a point cloud.
Definition at line 102 of file PointCloud.h.
◆ numLayers
| uint32_t dwPointCloud::numLayers |
Number of layers in a point cloud.
Definition at line 99 of file PointCloud.h.
◆ organized
| bool dwPointCloud::organized |
Flag indicating the data is ordered on the 3D grid.
Definition at line 84 of file PointCloud.h.
◆ points
| void* dwPointCloud::points |
Pointer to memory buffer of all points.
Not compact, but contiguous with invalid points in between layers.
Definition at line 91 of file PointCloud.h.
◆ sensorEndTimestamp
| dwTime_t dwPointCloud::sensorEndTimestamp |
Point cloud end sensor timestamp.
Definition at line 89 of file PointCloud.h.
◆ sensorStartTimestamp
| dwTime_t dwPointCloud::sensorStartTimestamp |
Point cloud start sensor timestamp.
Definition at line 88 of file PointCloud.h.
◆ size
| uint32_t dwPointCloud::size |
Number of points in the cloud including all layers.
Definition at line 93 of file PointCloud.h.
◆ timestamp
| dwTime_t dwPointCloud::timestamp |
Time when the point cloud capturing is finished on sensor (deprecated)
Definition at line 86 of file PointCloud.h.
◆ type
| dwMemoryType dwPointCloud::type |
Defines type of a memory GPU or CPU.
Definition at line 82 of file PointCloud.h.
The documentation for this struct was generated from the following file: