Detailed Description
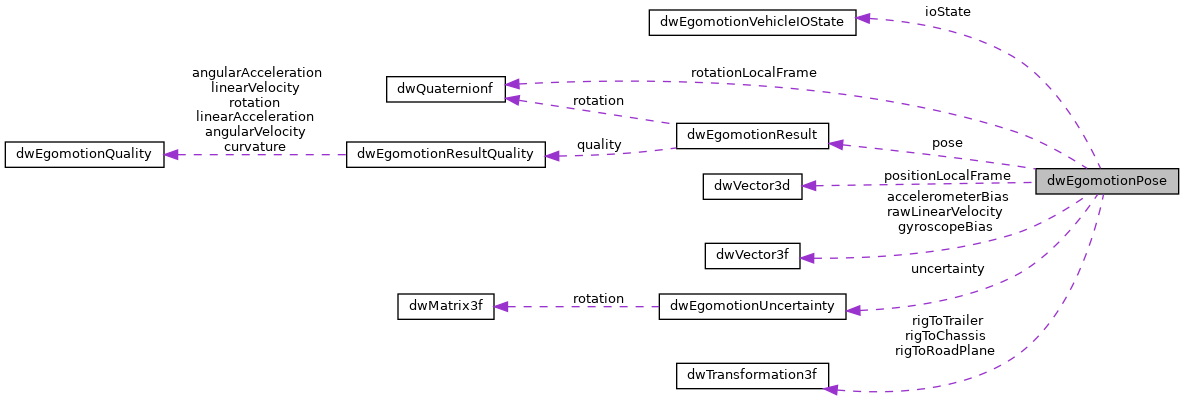
Holds values required for reconstruction of Egomotion history.
Definition at line 130 of file EgomotionExtra.h.
Field Documentation
◆ accelerometerBias
| dwVector3f dwEgomotionPose::accelerometerBias |
Definition at line 144 of file EgomotionExtra.h.
◆ computationTimestamp
| dwTime_t dwEgomotionPose::computationTimestamp |
Definition at line 147 of file EgomotionExtra.h.
◆ extraFlags
| int64_t dwEgomotionPose::extraFlags |
Definition at line 140 of file EgomotionExtra.h.
◆ frontSteeringAngleOffset
| float32_t dwEgomotionPose::frontSteeringAngleOffset |
Definition at line 151 of file EgomotionExtra.h.
◆ gyroscopeBias
| dwVector3f dwEgomotionPose::gyroscopeBias |
Definition at line 142 of file EgomotionExtra.h.
◆ ioState
| dwEgomotionVehicleIOState dwEgomotionPose::ioState |
Definition at line 136 of file EgomotionExtra.h.
◆ paddingDoNotUse
| uint32_t dwEgomotionPose::paddingDoNotUse[2] |
Definition at line 152 of file EgomotionExtra.h.
◆ pose
| dwEgomotionResult dwEgomotionPose::pose |
Definition at line 132 of file EgomotionExtra.h.
◆ positionLocalFrame
| dwVector3d dwEgomotionPose::positionLocalFrame |
Definition at line 134 of file EgomotionExtra.h.
◆ rawLinearVelocity
| dwVector3f dwEgomotionPose::rawLinearVelocity |
Definition at line 141 of file EgomotionExtra.h.
◆ relativeTranslationCovariance
| float32_t dwEgomotionPose::relativeTranslationCovariance[6] |
Definition at line 153 of file EgomotionExtra.h.
◆ rigToChassis
| dwTransformation3f dwEgomotionPose::rigToChassis |
Definition at line 137 of file EgomotionExtra.h.
◆ rigToRoadPlane
| dwTransformation3f dwEgomotionPose::rigToRoadPlane |
Definition at line 138 of file EgomotionExtra.h.
◆ rigToTrailer
| dwTransformation3f dwEgomotionPose::rigToTrailer |
Definition at line 139 of file EgomotionExtra.h.
◆ rotationLocalFrame
| dwQuaternionf dwEgomotionPose::rotationLocalFrame |
Definition at line 135 of file EgomotionExtra.h.
◆ sequenceId
| uint32_t dwEgomotionPose::sequenceId |
Definition at line 150 of file EgomotionExtra.h.
◆ uncertainty
| dwEgomotionUncertainty dwEgomotionPose::uncertainty |
Definition at line 133 of file EgomotionExtra.h.
◆ vehicleRollingDirection
| dwEgomotionDirectionTypes dwEgomotionPose::vehicleRollingDirection |
Definition at line 143 of file EgomotionExtra.h.
The documentation for this struct was generated from the following file: