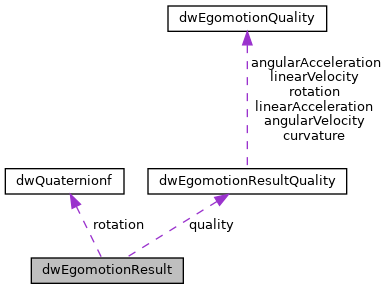
Detailed Description
Instantaneous state estimate.
- Note
- Validity of data fields indicated by flags in dwEgomotionResultQuality
Definition at line 457 of file EgomotionTypes.h.
Data Fields | |
| dwQuaternionf | rotation |
| Attitude represented as quaternion. More... | |
| dwTime_t | timestamp |
| Timestamp of state estimate [us]. More... | |
| float32_t | linearVelocity [3] |
| Linear velocity in body frame [m/s]. More... | |
| float32_t | angularVelocity [3] |
| Angular velocity in body frame [rad/s]. More... | |
| float32_t | linearAcceleration [3] |
| Linear acceleration in body frame [m/s^2]. More... | |
| float32_t | angularAcceleration [3] |
| Angular acceleration in body frame [rad/s^2]. More... | |
| float32_t | curvature |
| Planar curvature from motion in body frame [1/m]. More... | |
| dwEgomotionResultQuality | quality |
| Signal validities and their error bounds. More... | |
| int32_t | validFlags |
| Bitwise combination of dwEgomotionDataField flags. More... | |
Field Documentation
◆ angularAcceleration
| float32_t dwEgomotionResult::angularAcceleration[3] |
Angular acceleration in body frame [rad/s^2].
Definition at line 464 of file EgomotionTypes.h.
◆ angularVelocity
| float32_t dwEgomotionResult::angularVelocity[3] |
Angular velocity in body frame [rad/s].
Definition at line 462 of file EgomotionTypes.h.
◆ curvature
| float32_t dwEgomotionResult::curvature |
Planar curvature from motion in body frame [1/m].
Definition at line 465 of file EgomotionTypes.h.
◆ linearAcceleration
| float32_t dwEgomotionResult::linearAcceleration[3] |
Linear acceleration in body frame [m/s^2].
Definition at line 463 of file EgomotionTypes.h.
◆ linearVelocity
| float32_t dwEgomotionResult::linearVelocity[3] |
Linear velocity in body frame [m/s].
Definition at line 461 of file EgomotionTypes.h.
◆ quality
| dwEgomotionResultQuality dwEgomotionResult::quality |
Signal validities and their error bounds.
Definition at line 466 of file EgomotionTypes.h.
◆ rotation
| dwQuaternionf dwEgomotionResult::rotation |
Attitude represented as quaternion.
Definition at line 459 of file EgomotionTypes.h.
◆ timestamp
| dwTime_t dwEgomotionResult::timestamp |
Timestamp of state estimate [us].
Definition at line 460 of file EgomotionTypes.h.
◆ validFlags
| int32_t dwEgomotionResult::validFlags |
Bitwise combination of dwEgomotionDataField flags.
Deprecation notice: will be removed.
Definition at line 467 of file EgomotionTypes.h.
The documentation for this struct was generated from the following file: