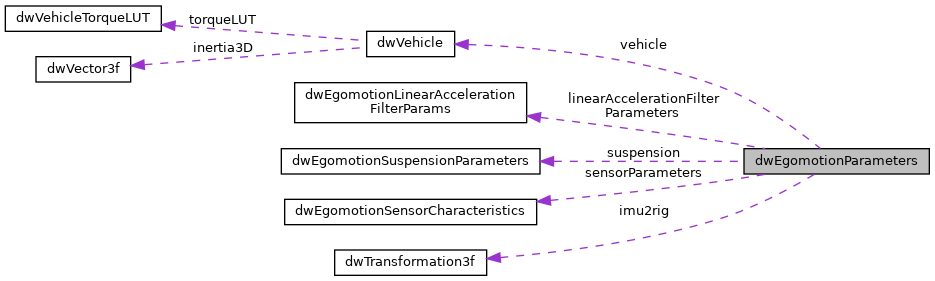
Detailed Description
Holds initialization parameters for the Egomotion module.
Definition at line 344 of file EgomotionTypes.h.
Data Fields | |
| dwVehicle | vehicle |
| Vehicle parameters to setup the model. More... | |
| float32_t | lateralSlipCoefficient |
| Lateral slip coefficient [rad*s^2/m]. More... | |
| dwTransformation3f | imu2rig |
| IMU extrinsics. More... | |
| dwMotionModel | motionModel |
| Specifies the motion model to be used for pose estimation. More... | |
| bool | estimateInitialOrientation |
| When enabled, initial rotation will be estimated from accelerometer measurements. More... | |
| bool | automaticUpdate |
| Automatically update state estimation. More... | |
| uint32_t | historySize |
| Number of state estimates to keep in the history (if 0 specified default of 1000 is used). More... | |
| float32_t | gyroscopeBias [3] |
| Initial gyroscope biases, if known at initialization time. More... | |
| dwEgomotionSensorCharacteristics | sensorParameters |
| Sensor parameters, containing information about sensor characteristics. More... | |
| dwEgomotionSpeedMeasurementType | speedMeasurementType |
Defines which velocity readings from dwVehicleIOState shall be used for egomotion estimation. More... | |
| dwEgomotionSteeringMeasurementType | steeringMeasurementType |
Defines which steering readings from dwVehicleIOState shall be used for egomotion estimation. More... | |
| dwEgomotionLinearAccelerationFilterParams | linearAccelerationFilterParameters |
| Linear acceleration filter parameters. More... | |
| dwEgomotionSuspensionParameters | suspension |
| Suspension model parameters. More... | |
Field Documentation
◆ automaticUpdate
| bool dwEgomotionParameters::automaticUpdate |
Automatically update state estimation.
In general to update motion estimation, a call to dwEgomotion_update is required. When automaticUpdate is set, the motion estimation update is triggered by the addition of new sensor measurements. The exact update timestamp is dependent on the sensor type and motion model implementation.
- Note
- when the automatic update is active, dwEgomotion_update will not update the filter state and throw a
DW_NOT_SUPPORTEDexception instead.
Definition at line 379 of file EgomotionTypes.h.
◆ estimateInitialOrientation
| bool dwEgomotionParameters::estimateInitialOrientation |
When enabled, initial rotation will be estimated from accelerometer measurements.
When disabled, initial rotation is assumed to be identity, i.e. vehicle standing on flat, horizontal ground.
- Note
- only available for DW_EGOMOTION_IMU_ODOMETRY motion model. Ignored when DW_EGOMOTION_ODOMETRY is used.
Definition at line 370 of file EgomotionTypes.h.
◆ gyroscopeBias
| float32_t dwEgomotionParameters::gyroscopeBias[3] |
Initial gyroscope biases, if known at initialization time.
Gyroscope biases are estimated internally at run-time, however it can be beneficial if the filter is initialized with already known biases. If unknown, leave biases zero-initialized.
Definition at line 389 of file EgomotionTypes.h.
◆ historySize
| uint32_t dwEgomotionParameters::historySize |
Number of state estimates to keep in the history (if 0 specified default of 1000 is used).
Also known as the capacity of the history. Any call to dwEgomotion_update, or automatic update, adds an estimate into the history.
Definition at line 384 of file EgomotionTypes.h.
◆ imu2rig
| dwTransformation3f dwEgomotionParameters::imu2rig |
IMU extrinsics.
Transformation from the IMU coordinate system to the vehicle rig coordinate system.
- Note
- the quality of the estimated motion is highly depended on the accuracy of the extrinsics.
Definition at line 362 of file EgomotionTypes.h.
◆ lateralSlipCoefficient
| float32_t dwEgomotionParameters::lateralSlipCoefficient |
Lateral slip coefficient [rad*s^2/m].
Used in linear function mapping lateral acceleration [m/s^2] to slip angle [rad], such that slipAngle = lateralSlipCoefficient * lateralAcceleration. If 0, default slip coefficient of -2.83e-3 [rad*s^2/m] is used.
- Note
- only available for DW_EGOMOTION_IMU_ODOMETRY motion model. Ignored when DW_EGOMOTION_ODOMETRY is used.
- Deprecated:
- Deriving lateral slip coefficient from vehicle parameters, unless this parameter is non-zero.
Definition at line 358 of file EgomotionTypes.h.
◆ linearAccelerationFilterParameters
| dwEgomotionLinearAccelerationFilterParams dwEgomotionParameters::linearAccelerationFilterParameters |
Linear acceleration filter parameters.
- Note
- only available for DW_EGOMOTION_IMU_ODOMETRY motion model. Ignored when other motion models are used.
Definition at line 404 of file EgomotionTypes.h.
◆ motionModel
| dwMotionModel dwEgomotionParameters::motionModel |
Specifies the motion model to be used for pose estimation.
Definition at line 365 of file EgomotionTypes.h.
◆ sensorParameters
| dwEgomotionSensorCharacteristics dwEgomotionParameters::sensorParameters |
Sensor parameters, containing information about sensor characteristics.
If the struct is zero initialized, default assumptions about sensor parameters are made.
- See also
- dwEgomotionSensorCharacteristics
Definition at line 394 of file EgomotionTypes.h.
◆ speedMeasurementType
| dwEgomotionSpeedMeasurementType dwEgomotionParameters::speedMeasurementType |
Defines which velocity readings from dwVehicleIOState shall be used for egomotion estimation.
Definition at line 397 of file EgomotionTypes.h.
◆ steeringMeasurementType
| dwEgomotionSteeringMeasurementType dwEgomotionParameters::steeringMeasurementType |
Defines which steering readings from dwVehicleIOState shall be used for egomotion estimation.
Definition at line 400 of file EgomotionTypes.h.
◆ suspension
| dwEgomotionSuspensionParameters dwEgomotionParameters::suspension |
Suspension model parameters.
The model is used internally to compensate for vehicle body rotation due to acceleration and resulting rotational suspension effects. If the struct is zero initialized, suspension will not be modeled and accounted for.
- Note
- only available for DW_EGOMOTION_IMU_ODOMETRY motion model. Ignored when other motion models are used.
Definition at line 411 of file EgomotionTypes.h.
◆ vehicle
| dwVehicle dwEgomotionParameters::vehicle |
Vehicle parameters to setup the model.
- Note
- The validity of the parameters will be verified at initialization time and an error will be returned back if vehicle parameters are found to be not plausible.
Definition at line 349 of file EgomotionTypes.h.
The documentation for this struct was generated from the following file: