Detailed Description
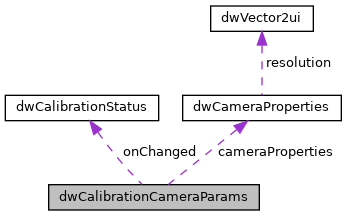
Calibration parameters for calibrating a camera sensor.
This should be added to the dwCalibrationParams params member.
Definition at line 72 of file CameraParams.h.
Data Fields | |
| dwCalibrationCameraMethod | method |
| Calibration method used for estimation. More... | |
| dwCalibrationCameraSignal | signals |
Signals to be estimated (can be a bitwise "or" of dwCalibrationCameraSignal flags) More... | |
| struct { | |
| uint32_t maxFeatureCount | |
| The maximum number of tracked features per camera. More... | |
| uint32_t maxFeatureHistorySize | |
| The maximum number of positions in a feature's location history. More... | |
| } | features |
| dwConstCameraModelHandle_t | calibratedCamera |
| A handle to calibrated camera to use in the camera calibration routine. More... | |
| dwCalibrationFastAcceptanceOption | fastAcceptance |
| Specification of fast-acceptance behaviour. More... | |
| void * | userData |
| A pointer to user data that will be passed along when a sensor calibration data has been changed. More... | |
| dwCalibrationStatusChanged | onChanged |
| An optional pointer to a function that will be called when the calibration status of a routine has changed. More... | |
| dwCameraProperties const * | cameraProperties |
| Pointer to Camera properties This pointer can't be null and needs to point to the properties of the camera to be calibrated. More... | |
| uint32_t | extrinsicProfileIndex |
| index of the extrinsic profile to be calibrated More... | |
Field Documentation
◆ calibratedCamera
| dwConstCameraModelHandle_t dwCalibrationCameraParams::calibratedCamera |
A handle to calibrated camera to use in the camera calibration routine.
This handle can be based off the same sensor index as passed into the calibration routine. If this parameter is DW_NULL_HANDLE then a calibrated camera will be created from the rig configuration. If a valid handle is passed, it will be used and the one from rig configuration will be ignored. Note: internally the calibration routine will clone this handle, hence the handle can be reused right after the initialization
Definition at line 95 of file CameraParams.h.
◆ cameraProperties
| dwCameraProperties const* dwCalibrationCameraParams::cameraProperties |
Pointer to Camera properties This pointer can't be null and needs to point to the properties of the camera to be calibrated.
Definition at line 112 of file CameraParams.h.
◆ extrinsicProfileIndex
| uint32_t dwCalibrationCameraParams::extrinsicProfileIndex |
index of the extrinsic profile to be calibrated
Definition at line 115 of file CameraParams.h.
◆ fastAcceptance
| dwCalibrationFastAcceptanceOption dwCalibrationCameraParams::fastAcceptance |
Specification of fast-acceptance behaviour.
By default, fast-acceptance is currently not enabled for camera calibrations (this might change in future DW versions). Enabled fast-acceptance additionally requires previously accepted estimates to be active.
Definition at line 101 of file CameraParams.h.
◆ features
| struct { ... } dwCalibrationCameraParams::features |
◆ maxFeatureCount
| uint32_t dwCalibrationCameraParams::maxFeatureCount |
The maximum number of tracked features per camera.
Definition at line 83 of file CameraParams.h.
◆ maxFeatureHistorySize
| uint32_t dwCalibrationCameraParams::maxFeatureHistorySize |
The maximum number of positions in a feature's location history.
Definition at line 86 of file CameraParams.h.
◆ method
| dwCalibrationCameraMethod dwCalibrationCameraParams::method |
Calibration method used for estimation.
Definition at line 75 of file CameraParams.h.
◆ onChanged
| dwCalibrationStatusChanged dwCalibrationCameraParams::onChanged |
An optional pointer to a function that will be called when the calibration status of a routine has changed.
The function should be valid to call for as long as the sensor is being calibrated.
Definition at line 108 of file CameraParams.h.
◆ signals
| dwCalibrationCameraSignal dwCalibrationCameraParams::signals |
Signals to be estimated (can be a bitwise "or" of dwCalibrationCameraSignal flags)
Definition at line 78 of file CameraParams.h.
◆ userData
| void* dwCalibrationCameraParams::userData |
A pointer to user data that will be passed along when a sensor calibration data has been changed.
Definition at line 104 of file CameraParams.h.
The documentation for this struct was generated from the following file: