Jun 17, 2022
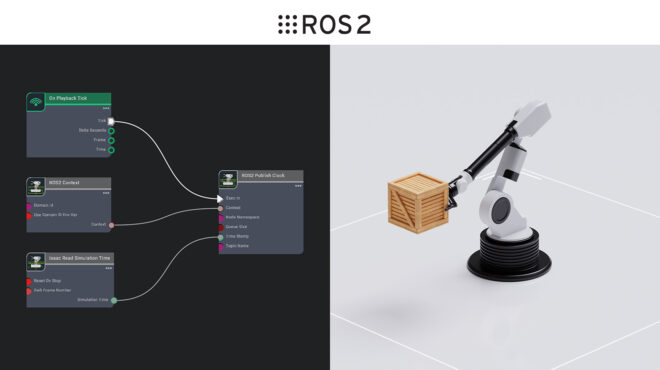
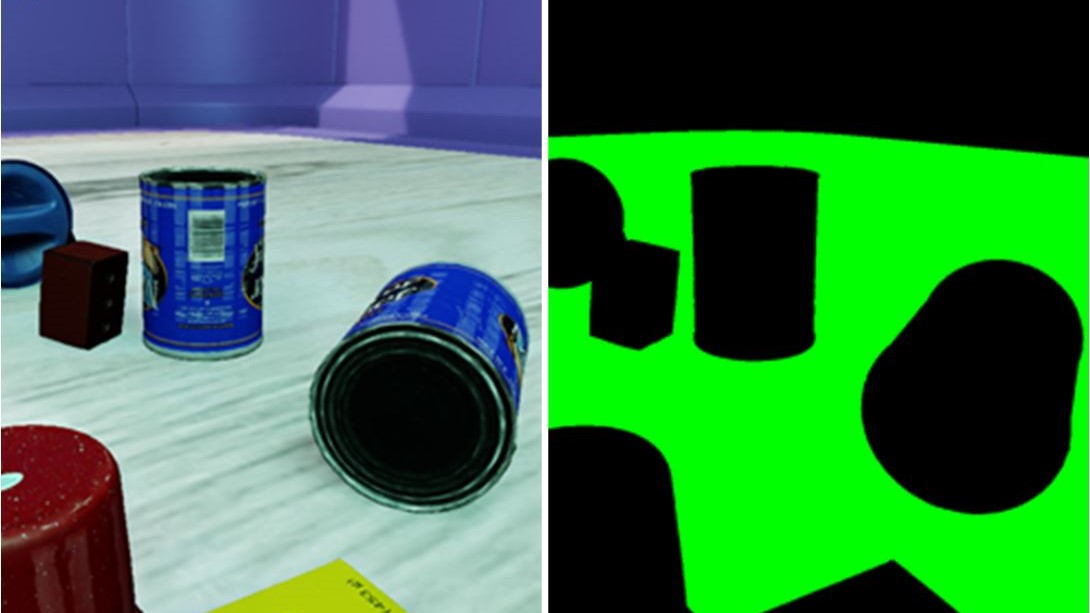
Expedite the Development, Testing, and Training of AI Robots with Isaac Sim
Today, NVIDIA announced the availability of the 2022.1 release of NVIDIA Isaac Sim. As a robotics simulation and synthetic data generation (SDG) tool, this...
3 MIN READ