Posts by Qian Lin

Computer Vision / Video Analytics
Jul 12, 2023
Near-Range Obstacle Perception with Early Grid Fusion
Automatic parking assist must overcome some unique challenges when perceiving obstacles. An ego vehicle contains sensors that perceive the environment around...
5 MIN READ
Robotics
Aug 25, 2020
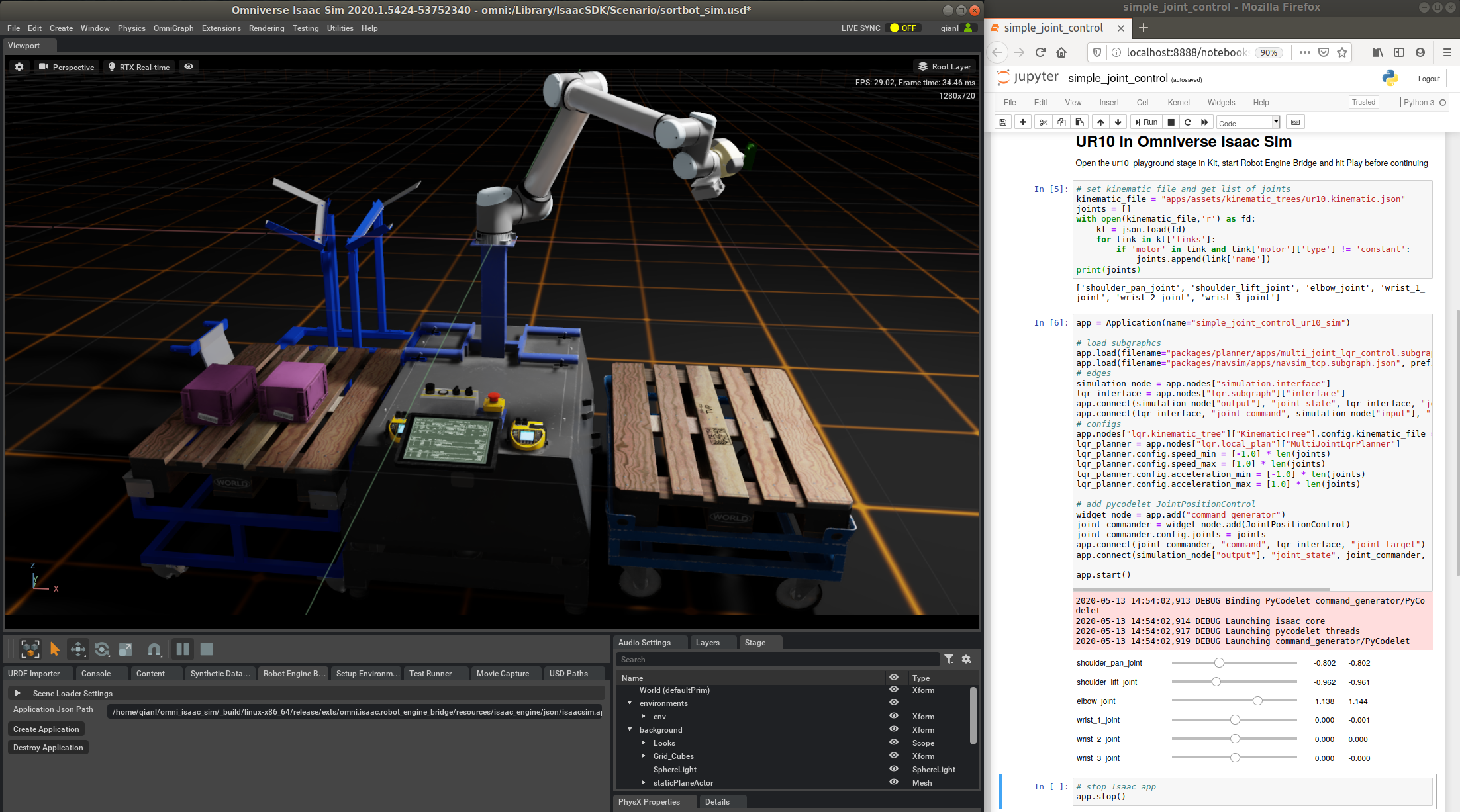
Developing Robotics Applications in Python with NVIDIA Isaac SDK
The modular and easy-to-use perception stack of NVIDIA Isaac SDK continues to accelerate the development of various mobile robots. Isaac SDK 2020.1 introduces...
14 MIN READ