DEVELOPER
홈
블로그
포럼
문서
다운로드
교육과정
검색하기
Join
Robot Perception
2024년 1월 17일
NVIDIA Isaac ROS로 딥 오브젝트 포즈 추정 훈련을 위한 합성 데이터 생성하기
로봇 에이전트가 주변 환경의 오브젝트와 상호 작용하려면 주변 오브젝트의 위치와 방향을 알아야 합니다. 이 정보는 3D 공간에서 강체의 6가지…
6 MIN READ
NVIDIA Isaac ROS로 딥 오브젝트 포즈 추정 훈련을 위한 합성 데이터 생성하기
2023년 11월 22일
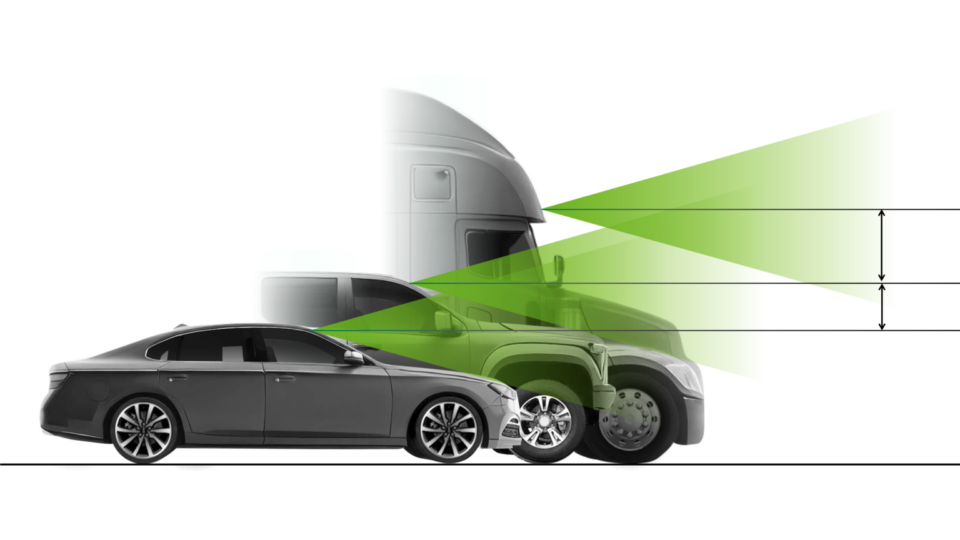
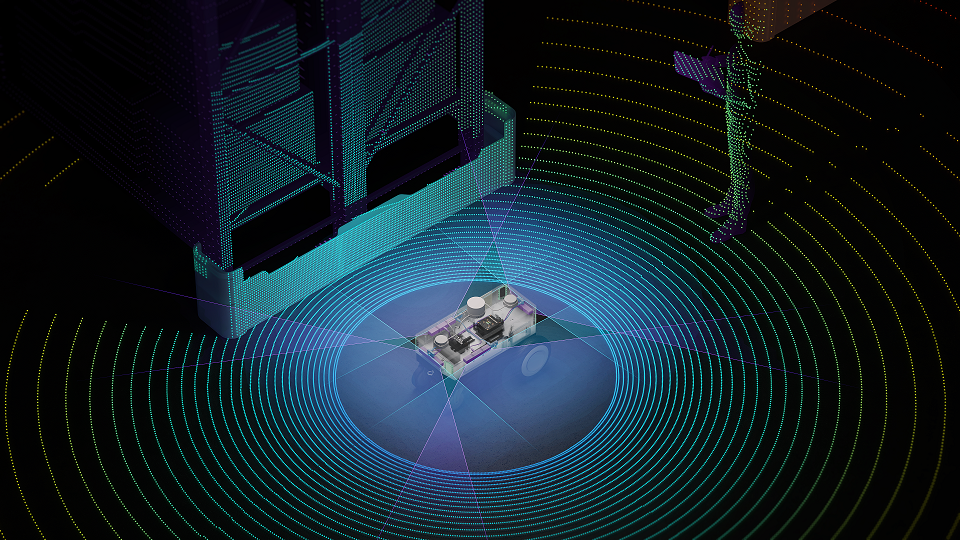
합성 데이터로 새로운 시각에서 안정적으로 자율 주행 차량 인식 활용하기
자율주행 차량(AV)은 소형 승용차부터 다축 세미트럭에 이르기까지 다양한 형태와 크기로 출시됩니다. 그러나 이러한 차량에 배포된 인식 알고리즘은…
4 MIN READ
합성 데이터로 새로운 시각에서 안정적으로 자율 주행 차량 인식 활용하기
2023년 10월 27일
NVIDIA Isaac 플랫폼의 고급 시뮬레이션 및 인식 도구로 AI 지원 로봇 공학 가속화
NVIDIA는 오늘 ROSCon 2023에서 NVIDIA Isaac 로보틱스 플랫폼에 대한 주요 업데이트를 발표했습니다. 이 플랫폼은 전 세계 로봇…
4 MIN READ
NVIDIA Isaac 플랫폼의 고급 시뮬레이션 및 인식 도구로 AI 지원 로봇 공학 가속화
2023년 6월 2일
NVIDIA Isaac Sim, ROS 및 Nimbus를 통한 멀티 로봇 환경 개발
점점 더 많은 자율 로봇이 실제 시나리오에 배포되면서 충실도가 높은 멀티 로봇 시뮬레이션 환경에 대한 필요성이 빠르게 증가하고 있습니다.
5 MIN READ
NVIDIA Isaac Sim, ROS 및 Nimbus를 통한 멀티 로봇 환경 개발
자세히 보기