Detailed Description
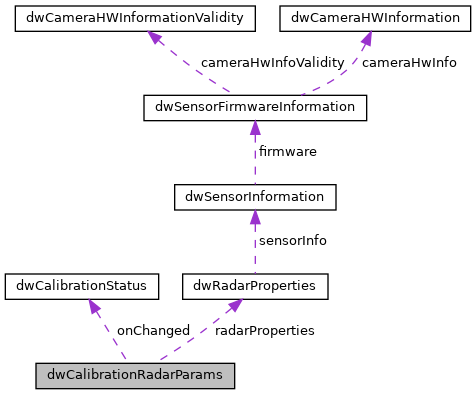
Calibration parameters for calibrating a radar sensor this should be added to the dwCalibrationParams params member.
Definition at line 53 of file RadarParams.h.
Data Fields | |
| bool | enableWheelRadiiEstimation |
| Enable radar-based estimation of wheel radii. More... | |
| dwCalibrationRadarPitchMethod | pitchMode |
| pitch calibration mode More... | |
| dwCalibrationFastAcceptanceOption | fastAcceptance |
| Specification of fast-acceptance behaviour. More... | |
| void * | userData |
| A pointer to user data that will be passed along when a sensor calibration data has been changed. More... | |
| dwCalibrationStatusChanged | onChanged |
| An optional pointer to a function that will be called when the calibration status of a routine has changed. More... | |
| dwRadarProperties const * | radarProperties |
| Pointer to Radar properties This pointer can't be null and needs to point to the properties of the radar to be calibrated. More... | |
Field Documentation
◆ enableWheelRadiiEstimation
| bool dwCalibrationRadarParams::enableWheelRadiiEstimation |
Enable radar-based estimation of wheel radii.
Definition at line 56 of file RadarParams.h.
◆ fastAcceptance
| dwCalibrationFastAcceptanceOption dwCalibrationRadarParams::fastAcceptance |
Specification of fast-acceptance behaviour.
By default, fast-acceptance is currently not enabled for radar calibrations (this might change in future DW versions). Enabled fast-acceptance additionally requires previously accepted estimates to be active.
Definition at line 65 of file RadarParams.h.
◆ onChanged
| dwCalibrationStatusChanged dwCalibrationRadarParams::onChanged |
An optional pointer to a function that will be called when the calibration status of a routine has changed.
The function should be valid to call for as long as the sensor is being calibrated
Definition at line 72 of file RadarParams.h.
◆ pitchMode
| dwCalibrationRadarPitchMethod dwCalibrationRadarParams::pitchMode |
pitch calibration mode
Definition at line 59 of file RadarParams.h.
◆ radarProperties
| dwRadarProperties const* dwCalibrationRadarParams::radarProperties |
Pointer to Radar properties This pointer can't be null and needs to point to the properties of the radar to be calibrated.
Definition at line 76 of file RadarParams.h.
◆ userData
| void* dwCalibrationRadarParams::userData |
A pointer to user data that will be passed along when a sensor calibration data has been changed.
Definition at line 68 of file RadarParams.h.
The documentation for this struct was generated from the following file: