Posts by Cenk Oguz Saglam
图形/仿真
2020年 11月 11日
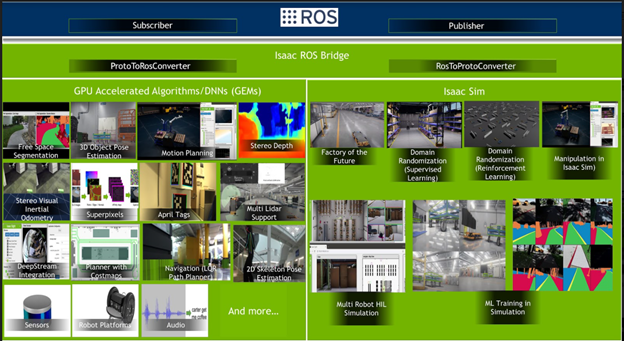
使用 ROS 和 NVIDIA Isaac SDK 构建机器人应用程序
Robot 操作系统( ROS )提供了许多软件库和工具来帮助构建机器人应用程序,包括框架、算法、传感器和机器人平台。
4 MIN READ