DEVELOPER
홈
블로그
포럼
문서
다운로드
교육과정
검색하기
Join
Beginner Technical
2026년 5월 12일
NVIDIA Nemotron 3 Nano Omni: 단일 오픈 모델로 멀티모달 에이전트 추론을 가속화
NVIDIA Nemotron 3 Nano Omni가 텍스트·이미지·비디오·오디오를 하나로 통합한 30B-A3B 하이브리드 MoE 오픈 모델로 멀티모달 에이전트 추론을 가속화합니다. NVFP4 양자화와 함께 최대 9.2배 실효 시스템 용량을 제공해요.
8 MIN READ
NVIDIA Nemotron 3 Nano Omni: 단일 오픈 모델로 멀티모달 에이전트 추론을 가속화
2026년 4월 11일
Gemma 4로 에지·온디바이스 AI 실현 — NVIDIA 전 플랫폼 완전 지원
Google Gemma 4 멀티모달·다국어 모델 패밀리가 출시됐습니다. 데이터센터의 NVIDIA Blackwell부터 에지의 Jetson까지 전 플랫폼을 지원하며, NVFP4 양자화·NIM 마이크로서비스·NeMo 파인튜닝으로 지금 바로 시작해 보세요.
4 MIN READ
Gemma 4로 에지·온디바이스 AI 실현 — NVIDIA 전 플랫폼 완전 지원
2026년 2월 23일
NVFP4가 AI 훈련과 추론 성능을 가속하는 3가지 방법
최신 AI 모델의 규모와 복잡성이 지속적으로 증가하면서 훈련과 추론에 필요한 컴퓨팅 성능 또한 급격히 증가하고 있습니다. 무어의 법칙으로는 더 이상…
4 MIN READ
NVFP4가 AI 훈련과 추론 성능을 가속하는 3가지 방법
2025년 10월 1일
OpenUSD를 활용하여 로보틱스 개발을 가속화하는 3가지 쉬운 방법
로보틱스에 대한 수요가 증가하면서 전례 없는 규모의 물리적으로 정확한 시뮬레이션에 대한 필요성이 대두되고 있습니다.
4 MIN READ
OpenUSD를 활용하여 로보틱스 개발을 가속화하는 3가지 쉬운 방법
2025년 9월 25일
오픈 소스로 공개된 NVIDIA Audio2Face 애니메이션 모델
생성형 AI는 거대 언어 모델(LLM)과 음성 모델을 활용해 비디오 게임부터 고객 서비스에 이르기까지 자연스러운 대화를 지원하는 지능형 3D…
4 MIN READ
오픈 소스로 공개된 NVIDIA Audio2Face 애니메이션 모델
2025년 9월 19일
슈퍼컴퓨터 없이도 수분 만에 극한 기상 예측하기
NVIDIA는 로렌스 버클리 국립연구소(Lawrence Berkeley National Laboratory, Berkeley Lab)와 협력하여…
3 MIN READ
슈퍼컴퓨터 없이도 수분 만에 극한 기상 예측하기
2025년 9월 19일
AI 추론 지연 시간을 줄이기 위한 Speculative Decoding 소개
거대 언어 모델(LLM)로 텍스트를 생성할 때는 구조적인 한계로 인해 성능을 제대로 끌어내기 어려운 경우가 많습니다. GPU는 뛰어난 연산 성능을…
7 MIN READ
AI 추론 지연 시간을 줄이기 위한 Speculative Decoding 소개
2025년 8월 6일
NVIDIA, GB200 NVL72로 OpenAI gpt-oss 모델을 클라우드부터 엣지까지 초당 150만 토큰 속도로 가속
NVIDIA와 OpenAI는 2016년 NVIDIA DGX 출시를 시작으로 AI의 한계를 넓혀왔습니다. 이번에는 OpenAI의 gpt-oss…
4 MIN READ
NVIDIA, GB200 NVL72로 OpenAI gpt-oss 모델을 클라우드부터 엣지까지 초당 150만 토큰 속도로 가속
2025년 5월 15일
NVIDIA 풀스택 솔루션을 통한 AI 추론 성능 최적화
2025년 3월 18일부로 NVIDIA Triton Inference Server는 이제 NVIDIA Dynamo로 명칭이 변경되었습니다.
5 MIN READ
NVIDIA 풀스택 솔루션을 통한 AI 추론 성능 최적화
2025년 4월 8일
데이터 사이언스를 위한 GPU 가속 시작하기
데이터 사이언스 분야에서 운영 효율성은 점점 더 복잡하고, 거대해지고 있는 데이터 세트를 처리하는 데 있어 핵심적인 요소입니다.
5 MIN READ
데이터 사이언스를 위한 GPU 가속 시작하기
2025년 2월 7일
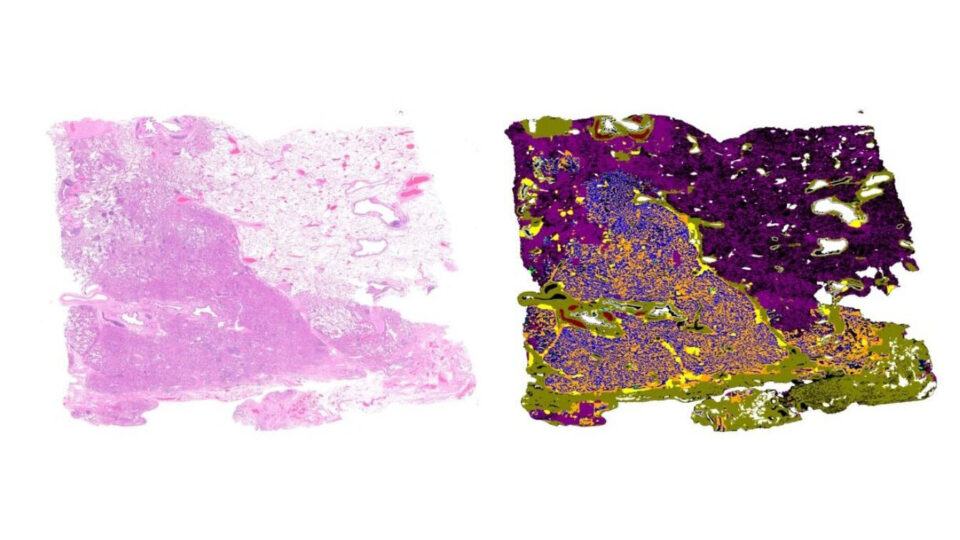
새로운 AI 모델, 암 종양의 세포 수준 시각화 제공
암을 연구하는 과학자들이 암 세포를 세포 수준에서 매핑하고 시각화할 수 있는 새로운 AI 모델을 공개했습니다. 연구자들은 이 모델이 특정 세포 간…
2 MIN READ
새로운 AI 모델, 암 종양의 세포 수준 시각화 제공
2024년 9월 27일
전 세계 해양 오염 추적을 혁신하는 하이테크 AI 프레임워크
AI 기반 원격 감지 연구는 전 세계 해양 정화 노력을 위한 역동적인 새 도구를 제공합니다. ISPRS 사진측량 및 원격 감지 저널에 자세히 소개된…
3 MIN READ
전 세계 해양 오염 추적을 혁신하는 하이테크 AI 프레임워크
2024년 9월 6일
AI 기반 플랫폼으로 개인 맞춤형 암 진단 및 치료법 발전
최근 한 연구에서는 의사가 환자의 폐암을 빠르고 정확하게 진단하고 평가하는 데 도움이 되는 최첨단 AI 기반 병리 플랫폼을 소개했습니다.
2 MIN READ
AI 기반 플랫폼으로 개인 맞춤형 암 진단 및 치료법 발전
2024년 8월 21일
LLM 에이전트 소개
재무 분석가가 회사의 실적에 대한 질문에 답할 수 있도록 설계된 거대 언어 모델(LLM) 애플리케이션은 잘 설계된 검색 증강 생성(RAG)…
6 MIN READ
LLM 에이전트 소개
2024년 6월 24일
Windows RTX PC용 NVIDIA RTX AI 툴킷으로 AI 기반 앱 개발 간소화
NVIDIA는 오늘 Windows 애플리케이션 개발자가 Windows 애플리케이션용 AI 모델을 맞춤화, 최적화 및 배포할 수 있는 도구 및…
5 MIN READ
Windows RTX PC용 NVIDIA RTX AI 툴킷으로 AI 기반 앱 개발 간소화
2024년 5월 3일
NVIDIA TensorRT-LLM 및 NVIDIA Triton Inference Server로 Meta Llama 3 성능 강화
LLM 추론 성능을 가속화 및 최적화하는 NVIDIA TensorRT-LLM의 Meta Llama 3 모델 제품군에 대한 지원을 발표합니다.
5 MIN READ
NVIDIA TensorRT-LLM 및 NVIDIA Triton Inference Server로 Meta Llama 3 성능 강화
자세히 보기