NVIDIA Isaac ROS
Discover a faster, easier way to build high-performance solutions with the NVIDIA Isaac™ Robot Operating System (ROS) collection of hardware-accelerated packages. It includes multiple open-source options and is designed to give ROS developers a whole new way to build on NVIDIA hardware such as NVIDIA® Jetson™.
Key Benefits of Isaac ROS
High Throughput Perception
Isaac ROS provides individual packages (GEMs) and complete pipelines (NITROS) with image-processing and computer vision functionality. These solutions have been highly optimized for NVIDIA GPUs and NVIDIA Jetson platforms.
Modular, Flexible Packages
Modular packages let any ROS developer take exactly what they need to integrate in an application. This means you can now replace an entire pipeline or simply swap out a single algorithm.
Reduced Development Times
Isaac ROS is similar to existing and compatible with familiar ROS 2 nodes, making it easier to integrate into existing applications.
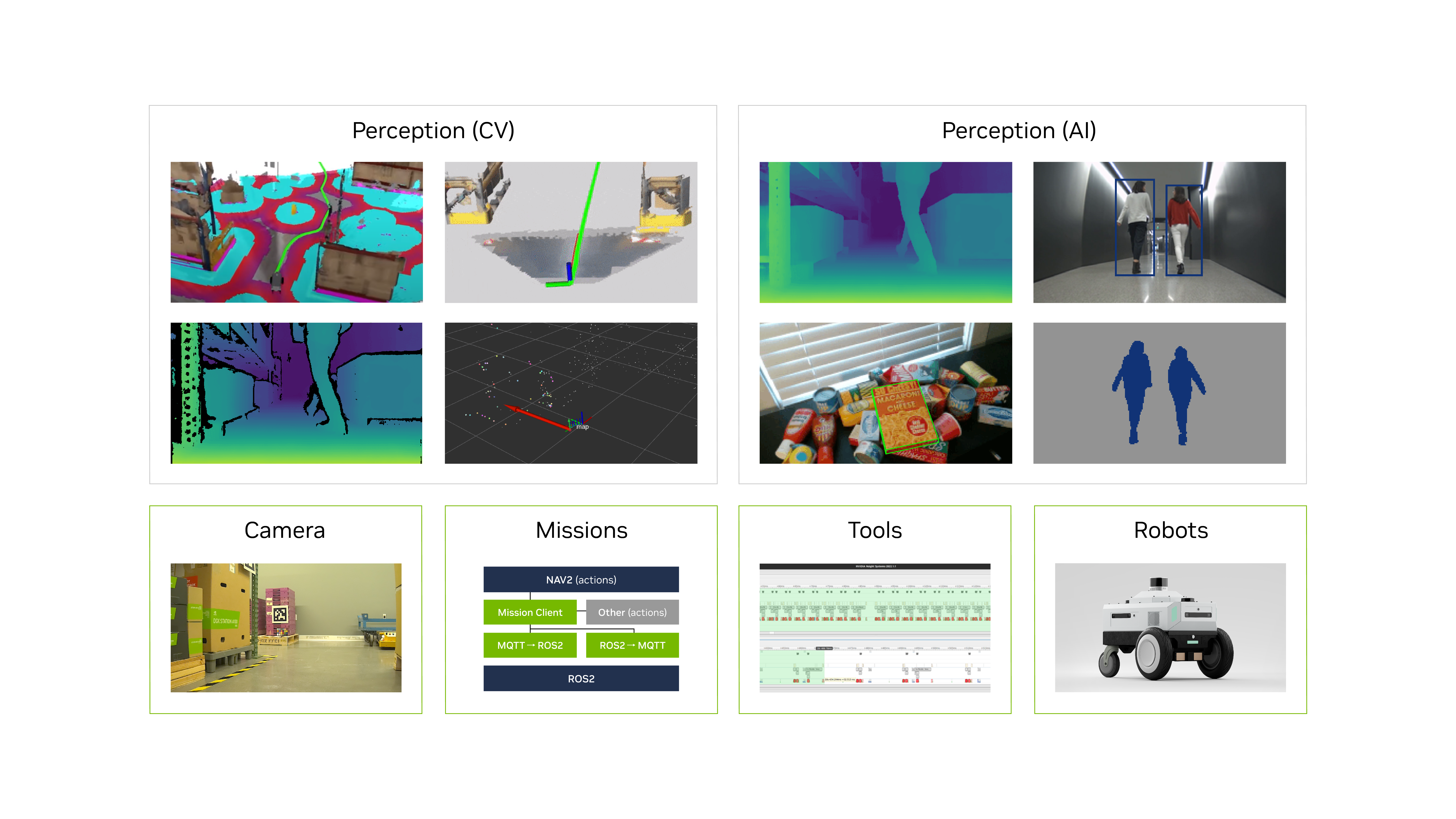
A Rich Collection of Perception AI Packages
Access the full range of ROS 2 nodes that operate on camera and lidar sensor data. These include DNN-based algorithms that are key to delivering high-performance perception and hardware acceleration to ROS-based robotics applications.
Coming soon to Isaac ROS 3.0
To get started, just install the ROS 2 Humble packages for NVIDIA JetPack™. Check out all the details at Isaac ROS release notes.
cuMotion for Robot Manipulation
Discover NVIDIA® CUDA-accelerated path planning for robotic arm-related tasks such as collision detection using robot masking and integrated trajectory optimization using the MoveIt motion-planning framework.
Foundation Pose
Introducing our state-of-the-art foundational model for 6D pose estimation to detect novel objects. Developers can use this model to build applications that encounter prior unseen objects.
Multi-Camera Visual Inertial Odometry
This advanced solution allows for smarter localization for robots. They can quickly and accurately maintain knowledge of their position while accurately detecting and avoiding obstacles.
NVIDIA Isaac Transport for ROS (NITROS)
The latest Humble ROS 2 release improves performance on compute platforms that offer hardware accelerators. It enables accelerated computing features for type adaptation and type negotiation, eliminating software/CPU overhead and improving performance of hardware acceleration.
The NVIDIA implementation of type adaption and negotiation is called NITROS. These are ROS processing pipelines made up of Isaac ROS hardware-accelerated modules (a.k.a. GEMs). The source code of NITROS is now available for developers to modify, extend, and use in your applications.
NVIDIA Isaac Transport for ROS
H.264 video encode and decode hardware-accelerated packages for NITROS are used for compressed camera data recording and playback for development of AI models and perception functions. They compress two 1080p stereo cameras at 30fps (>120fps total) and reduce the data footprint by ~10X.

3D Scene Reconstruction With NvBlox

Knowledge of a robot’s position alone isn't enough to safely navigate complex environments. Robots must also be able to discover obstacles on their own. NvBlox (preview) uses RGB-D data to create a dense 3D representation of the robot's environment. It includes unforeseen obstacles that could cause a danger to the robot if not observed in real time. This data helps generate a temporal costmap for navigation stack.
Isaac ROS NvBlox
DNN Inference Processing
DNN Inference GEM is a set of ROS 2 packages that lets developers use any of NVIDIA’s numerous inference models available on NGC, or even provide their own DNN. Further tuning of pre-trained models or optimizations of developers' own models can be done with the NVIDIA TAO Toolkit.
After optimization, these packages are deployed by the NVIDIA TensorRT™ high-performance inference SDK or Triton™ , NVIDIA’s inference server. If the desired DNN model isn't supported by TensorRT, then Triton can be used to deploy the model.
Additional GEMs incorporating model support are available and include support for U-Net and DOPE. The U-Net package, based on TensorRT, can be used for generating semantic segmentation masks from images and the DOPE package can be used for 3D pose estimation for all detected objects.
DNN Inference GEM is the fastest way to incorporate performant AI inference in a ROS 2 application. The pretrained model—PeopleSemSegNet, pictured in the image (right)—runs at 325fps @544p on NVIDIA Jetson AGX Orin.
Isaac ROS DNN Inference
Isaac ROS Pose Estimation
Isaac ROS Image Segmentation

Stereo Perception

Stereo perception DNN-based GEMs are designed to help roboticists with common perception tasks.
Enhanced Semi-Supervised stereo disparity (ESS) is a DNN for stereo camera disparity prediction and Bi3D is a DNN for vision-based proximity detection.
Both are pretrained for robotics applications using synthetic data and are intended for commercial use.
Isaac ROS DNN Stereo Disparity
Isaac ROS Proximity Segmentation
Visual SLAM Based Localization
As autonomous machines move around in their environments, they must keep track of where they are. VSLAM provides a method for visually estimating the position of a robot relative to its start position, known as VO (visual odometry).The Isaac ROS GEM for VSLAM provides this powerful functionality to ROS 2 developers.
This GEM offers the best accuracy for a real-time stereo-camera VSLAM solution. You can find publicly available results based on the widely used KITTI database here. For the KITTI benchmark, the algorithm achieves a drift of ~1% in localization and an orientation error of 0.003 degrees per meter of motion. In addition to being very accurate, this GPU-accelerated package runs extremely fast. The package uses cuVSLAM library to find and match more key points in real-time, with fine tuning to minimize overall reprojection error. This is attained by using a combination of visual data and IMU measurements
Isaac ROS Stereo Visual SLAM

High-Performance Perception With NITROS Pipelines
Boost performance with powerful pipelines that take advantage from hardware acceleration additions to ROS 2 Humble.
You can find a complete performance summary here
|
|
|
|
|
|
|
|
|
|
|
|---|---|---|---|---|---|---|---|---|---|
| AprilTag Node | 720p |
216 fps 9.7 ms |
167 fps 14 ms |
106 fps 14 ms |
74.1 fps 21 ms |
74.7 fps 19 ms |
531 fps 5.6 ms |
473 fps 6.4 ms |
437 fps 6.1 ms |
| Centerpose Pose Estimation Graph | VGA | 36.1 fps 5.7 ms |
20.2 fps 16 ms |
19.4 fps 7.4 ms |
13.8 fps 12 ms |
13.6 fps 15 ms |
50.2 fps 14 ms |
50.2 fps 14 ms |
50.2 fps 2.2 ms |
| DNN Stereo Disparity Node | 576p | 78.8fps 4.1 ms |
26.2 fps 15 ms |
27.2 fps 6.2 ms |
-- | 22.1 fps 7.4 ms |
350 fps 4.6 ms |
204 fps 4.4 ms |
159 fps 3.8 ms |
| H.264 Decoder Node | 1080p | 179 fps 9.5 ms |
151 fps 12 ms |
-- | -- | -- | 596 fps 3.2 ms |
596 fps 3.1 ms |
538 fps 3.9 ms |
| DetectNet Object Detection Graph | 544p | 232 fps 11 ms |
90.0 fps 19 ms |
105 fps 15 ms |
74.2fps 22 ms |
74.5 fps 22 ms |
764 fps 3.9 ms |
644 fps 5.6 ms |
471 fps 6.4 ms |
| Visual SLAM Node | 720p | 228 fps 40 ms |
122 fps 58 ms |
127 fps 74 ms |
113 fps 65 ms |
169 fps 44 ms |
280 fps 40 ms |
456 fps 37 ms |
363 fps 44 ms |
Mission Dispatch and Client

Isaac Mission Dispatch allows a cloud/edge system to send and monitor tasks from a ROS 2 robot with Isaac Mission Client using industry standards for production deployments. Mission Dispatch is a cloud-native microservice that can be integrated as part of larger fleet management systems.
Mission Dispatch and Mission Client are both available in open source and can be used to test robots in simulation for automating test portions of continuous integration and continuous deployments (CI/CD), performing a series of predefined tasks evaluated against expected results. This benefit is in addition to the primary usage of assigning tasks to robots in operation.
Mission Dispatch can be integrated into fleet management systems (e.g., Anyfleet, Roborunner FleetGateway) with Mission Client on the ROS 2 robot. It will also interoperate with other ROS 2 Clients built on VDA5050.
Isaac ROS Mission Dispatch
Isaac ROS Mission Client
Camera/Image Processing
.jpg "Isaac ROS camera/image processing")
The image shows a lens-distorted camera image (left) and rectified image using LDC GEM (right).
In a typical robotics image-processing pipeline, raw data from the camera sensor must be processed before being passed off to a DNN or classic computer vision module for perception processing. This image processing consists of things like Lens Distortion Correction (LDC), image resizing, and image format conversion. If stereo cameras are involved, then estimating disparity is also required. The image processing GEMs have been designed to take advantage of the specialized computer vision hardware available in Jetson solutions, like the GPU, the VIC (Video and Image Compositor), and the PVA (Programmable Vision Accelerator).
For robots using cameras connected via a CSI interface, NVIDIA provides the Argus package for ROS hardware acceleration.
Isaac ROS Image Processing
What Leading Adopters Are Saying
“The cuVSLAM in the Isaac ROS package fuses IMU and visual data for robust mapping and localization through 6 DoF pose estimate. This ready-to-use GPU accelerated robotics SDK enables real-time performance for Direct Drive’s core perception algorithms.”
— Di Zhang, President at Direct Drive Tech
“It is the breadth of NVIDIA's offering that makes it the perfect fit for FarmX. From the operating environment and libraries in the Isaac ROS to the various modules that allow us to deploy on vehicles ranging from drones and large tractors, Jetson allows us to focus on developing our application and not worry about the platform.”
— Dan Hennage, Vice President of Robotics at FarmX
“NVIDIA's Isaac ROS empowers us with the GPU-accelerated performance needed to track objects in real time with utmost accuracy. The exceptional quality of pose estimation it offers us is key to delivering the high level of reliability and precision that our customers expect from our solutions.”
— Zach Zweig-Vinegar, Director of Software Engineering, Miso Robotics
"NVIDIA Jetson platform and Isaac ROS SDK has enabled startups like us to build solutions better and faster. Peer Robotics incorporates global localization and NVBlox from Isaac ROS packages along with our stack to provide end to end solutions to accelerate next generation warehouse automation."
— Rishabh Agarwal, CEO at Peer Robotics
"By integrating Isaac ROS into our ROS2 system, we were able to run multiple models with the Triton inference server, accelerating and simplifying input and output processes without requiring extensive knowledge of AI and ML implementation. As a result, we have significantly enhanced our robotic total stations to recognize tracking targets for the purposes of high precision positioning. Additionally, we have empowered our system with the ability to characterize construction vehicles on busy construction sites, allowing us to be more discerning around who needs to be tracked and when during earthworks operations."
— Adrian Ferrier, Director, Engineering, Trimble
Customer Stories

Direct Drive Tech
Isaac ROS delivers real-time performance for Direct Drive’s core perception algorithms used on Tita, their wheeled and bipedal robot.

FarmX
Isaac ROS libraries and tools such as GPU-accelerated computer vision, deep learning, and visual odometry bring exceptional performance to autonomous farm robots.

Miso Robotics
Isaac ROS’s AprilTag marker library enables tracking of baskets' position at all times to support the overall goal of kitchen automation.

Peer Robotics
Isaac ROS streamlines and automates tasks that usually require skilled labor with modern AI perception.

.lumen
Isaac ROS optimized packages such as VSLAM and stereo perception enable smart glasses for the blind.
Isaac ROS Partners
Isaac ROS partners offer drivers that seamlessly integrate with the Isaac ROS GEMs for ROS hardware acceleration. You can see complete list of drivers and compatible hardware here.



