NVIDIA 中国开发者日活动 中国・苏州 | 2025 年 11 月 14 日
了解详情
DEVELOPER
首页
博客
论坛
论坛 (英文)
文档
下载
培训
Search
加入
Synthetic Data Generation
2025年 9月 29日
在 NVIDIA Isaac Lab 2.3 中使用全身控制和增强遥操作,简化机器人学习
基于真实世界演示训练机器人策略,不仅成本高、速度慢,还容易出现过拟合问题,进而限制其在不同任务与环境中的泛化能力。
3 MIN READ
在 NVIDIA Isaac Lab 2.3 中使用全身控制和增强遥操作,简化机器人学习
2023年 11月 13日
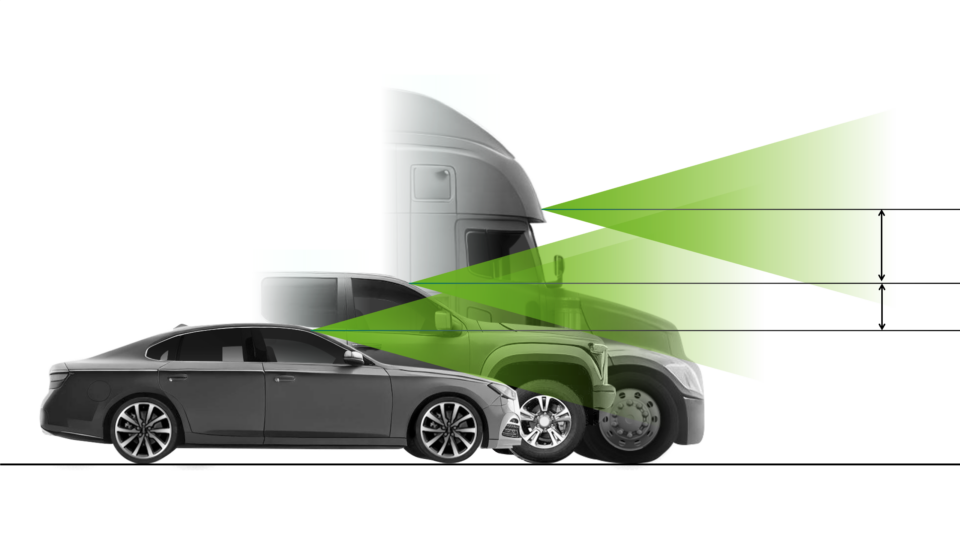
使用合成数据处理自动驾驶汽车感知
自动驾驶汽车 (AV) 有各种形状和大小,从小型客车到多轴半挂卡车不等。但是,部署在这些车辆上的感知算法必须经过训练,以处理类似情况,
2 MIN READ
使用合成数据处理自动驾驶汽车感知
加载更多