NVIDIA 中国开发者日活动 中国・苏州 | 2025 年 11 月 14 日
了解详情
DEVELOPER
首页
博客
论坛
论坛 (英文)
文档
下载
培训
Search
加入
Isaac Lab
2025年 10月 21日
面向 Physical AI 的全栈式解决方案:解析 NVIDIA 与阿里云 PAI 的完整技术链路
随着人工智能向物理世界深度融合,Physical AI 正在重塑智能体的研发范式。它对数据生成、仿真验证、模型训练与边缘部署提出了一些挑战。
2 MIN READ
面向 Physical AI 的全栈式解决方案:解析 NVIDIA 与阿里云 PAI 的完整技术链路
2025年 9月 29日
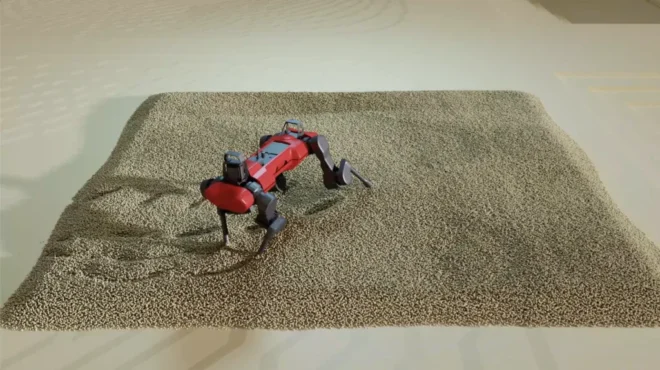
借助 NVIDIA Isaac Lab 和 Newton 训练四足机器人运动策略并对布料操作进行仿真
物理在机器人仿真中发挥着至关重要的作用,它为机器人在真实环境中的行为及交互提供了精准的虚拟呈现基础。借助仿真器,研究人员和工程师能够以安全、
3 MIN READ
借助 NVIDIA Isaac Lab 和 Newton 训练四足机器人运动策略并对布料操作进行仿真
2025年 9月 29日
使用 NVIDIA Isaac Lab 和 Newton 训练四足运动策略并模拟布料操作
物理学在机器人仿真中起着关键作用,为机器人在现实环境中的行为与交互提供了精确的虚拟呈现基础。借助这些仿真工具,研究人员和工程师能够以更安全、
3 MIN READ
使用 NVIDIA Isaac Lab 和 Newton 训练四足运动策略并模拟布料操作
2025年 9月 29日
在 NVIDIA Isaac Lab 2.3 中通过全身控制和增强远程操作简化机器人学习
从现实世界演示中训练机器人策略不仅成本高、耗时长,还容易导致过拟合,从而限制了在不同任务和环境中的泛化能力。相比之下,
3 MIN READ
在 NVIDIA Isaac Lab 2.3 中通过全身控制和增强远程操作简化机器人学习
2025年 9月 25日
R²D²:NVIDIA 研究中心的三项神经学突破重塑机器人学习
尽管当今的机器人在受控环境中表现出色,但在应对现实世界任务所需的不可预测性、灵活性和细微交互方面仍面临挑战,
2 MIN READ
R²D²:NVIDIA 研究中心的三项神经学突破重塑机器人学习
2025年 8月 11日
开发者利用 NVIDIA Omniverse 库打造快速可靠的机器人模拟
在 SIGGRAPH 大会上,NVIDIA 发布了 NVIDIA Omniverse 库和 Cosmos 世界基础模型 (WFM) 的更新。
2 MIN READ
开发者利用 NVIDIA Omniverse 库打造快速可靠的机器人模拟
加载更多