NVIDIA 中国开发者日活动 中国・苏州 | 2025 年 11 月 14 日
了解详情
DEVELOPER
首页
博客
论坛
论坛 (英文)
文档
下载
培训
Search
加入
Humanoid Robots
2025年 9月 29日
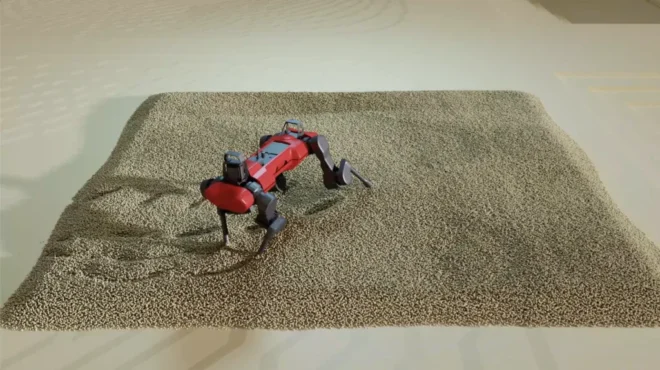
借助 NVIDIA Isaac Lab 和 Newton 训练四足机器人运动策略并对布料操作进行仿真
物理在机器人仿真中发挥着至关重要的作用,它为机器人在真实环境中的行为及交互提供了精准的虚拟呈现基础。借助仿真器,研究人员和工程师能够以安全、
3 MIN READ
借助 NVIDIA Isaac Lab 和 Newton 训练四足机器人运动策略并对布料操作进行仿真
2025年 9月 29日
使用 NVIDIA Isaac Lab 和 Newton 训练四足运动策略并模拟布料操作
物理学在机器人仿真中起着关键作用,为机器人在现实环境中的行为与交互提供了精确的虚拟呈现基础。借助这些仿真工具,研究人员和工程师能够以更安全、
3 MIN READ
使用 NVIDIA Isaac Lab 和 Newton 训练四足运动策略并模拟布料操作
2025年 9月 29日
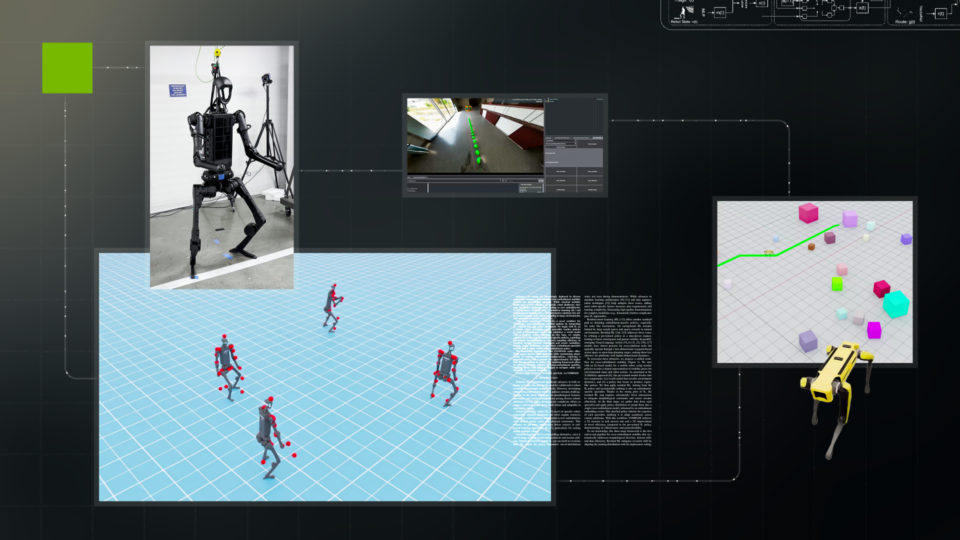
在 NVIDIA Isaac Lab 2.3 中通过全身控制和增强远程操作简化机器人学习
从现实世界演示中训练机器人策略不仅成本高、耗时长,还容易导致过拟合,从而限制了在不同任务和环境中的泛化能力。相比之下,
3 MIN READ
在 NVIDIA Isaac Lab 2.3 中通过全身控制和增强远程操作简化机器人学习
2025年 9月 29日
在 NVIDIA Isaac Lab 2.3 中使用全身控制和增强遥操作,简化机器人学习
基于真实世界演示训练机器人策略,不仅成本高、速度慢,还容易出现过拟合问题,进而限制其在不同任务与环境中的泛化能力。
3 MIN READ
在 NVIDIA Isaac Lab 2.3 中使用全身控制和增强遥操作,简化机器人学习
2025年 6月 16日
使用世界基础模型生成的合成轨迹数据提高机器人学习效果
在机电一体化和机器人 AI 基础模型的进步的推动下,通用型机器人技术已经问世。但关键的瓶颈依然存在:
2 MIN READ
使用世界基础模型生成的合成轨迹数据提高机器人学习效果
2025年 4月 25日
R²D²:利用 NVIDIA 研究工作流程和模型提升灵巧机器人的适应性
如今,Robotic arms 用于组装、包装、检查等更多应用领域。但是,它们仍然经过预编程,可以执行特定的、通常是重复性的任务。
2 MIN READ
R²D²:利用 NVIDIA 研究工作流程和模型提升灵巧机器人的适应性
2025年 4月 11日
使用 NVIDIA NIM 管理科学文献中的生物研究成果
科学论文多种多样,通常为同一实体使用不同的术语,使用不同的方法来研究生物现象,并在不同的上下文中展示研究结果。
2 MIN READ
使用 NVIDIA NIM 管理科学文献中的生物研究成果
2025年 3月 27日
R²D²:利用 NVIDIA 研究中心的新型工作流和 AI 基础模型,提升机器人的移动和全身控制能力
欢迎阅读首期“NVIDIA 机器人研究与开发摘要(R²D²)”。
3 MIN READ
R²D²:利用 NVIDIA 研究中心的新型工作流和 AI 基础模型,提升机器人的移动和全身控制能力
2025年 3月 18日
人形机器人学习的合成运动生成管道构建
通用人形机器人需要能够快速适应现有的以人类为中心的城市和工业工作空间,处理繁琐、重复或体力要求高的任务。这些移动机器人经过设计,
2 MIN READ
人形机器人学习的合成运动生成管道构建
2025年 3月 18日
构建人形机器人学习的合成运动生成流程
通用人形机器人需要能够快速适应现有的以人类为中心的城市和工业工作空间,处理繁琐、重复或体力要求高的任务。这些移动机器人经过设计,
2 MIN READ
构建人形机器人学习的合成运动生成流程
2025年 3月 18日
加速通用人形机器人的开发:NVIDIA Isaac GR00T N1
人形机器人需要能够适应人类工作空间,处理重复性或高强度任务。然而,为真实世界的任务和不可预测的环境创建通用人形机器人是一项挑战。通常来说,
2 MIN READ
加速通用人形机器人的开发:NVIDIA Isaac GR00T N1
2025年 1月 9日
NVIDIA Cosmos World 基础模型平台助力物理 AI 进步
随着机器人和 自动驾驶汽车 的发展,加速 物理 AI 的发展变得至关重要,而物理 AI 使自主机器能够感知、理解并在现实世界中执行复杂的操作。
4 MIN READ
NVIDIA Cosmos World 基础模型平台助力物理 AI 进步
2025年 1月 6日
利用最新的 NVIDIA Isaac 版本推进机器人学习、感知和操控技术
在 CES 2025 上,NVIDIA 宣布了对 NVIDIA Isaac 的重要更新。NVIDIA Isaac 是一个由加速库、
3 MIN READ
利用最新的 NVIDIA Isaac 版本推进机器人学习、感知和操控技术
加载更多