NVIDIA 中国开发者日活动 中国・苏州 | 2025 年 11 月 14 日
了解详情
DEVELOPER
首页
博客
论坛
论坛 (英文)
文档
下载
培训
Search
加入
Deep dive
2025年 10月 15日
面向代理式 AI 和 6G 时代的加速和分布式 UPF
电信行业正快速向AI原生无线接入网(AI-RAN)和以AI为核心的6G方向演进。分布式用户面功能(dUPF)通过去中心化的数据包处理与路由,
4 MIN READ
面向代理式 AI 和 6G 时代的加速和分布式 UPF
2025年 10月 14日
借助 QuTip 和 scQubits 中的 NVIDIA cuQuantum 集成加速量子位研究
NVIDIA cuQuantum 是一个软件开发工具包(SDK),可加速电路级(数字)和器件级(模拟)的量子模拟。
2 MIN READ
借助 QuTip 和 scQubits 中的 NVIDIA cuQuantum 集成加速量子位研究
2025年 10月 9日
从助手到对手:利用代理式 AI 开发者工具
越来越多的开发者开始采用支持人工智能的编码工具,例如 Cursor、OpenAI Codex、Claude Code 和 GitHub…
3 MIN READ
从助手到对手:利用代理式 AI 开发者工具
2025年 10月 3日
NVIDIA NV-Tesseract 和 NVIDIA NIM 实现半导体制造智能异常检测
在之前的一篇博客文章中,我们介绍了 NVIDIA NV-Tesseract,这是一系列旨在统一框架内处理多种时间序列任务的模型,涵盖异常检测、
2 MIN READ
NVIDIA NV-Tesseract 和 NVIDIA NIM 实现半导体制造智能异常检测
2025年 9月 30日
借助 NVIDIA NV-Tesseract-AD 推进行业应用的异常检测
在最近的一篇博客文章中,我们介绍了 NVIDIA NV-Tesseract,这是一系列旨在将异常检测、分类与预测统一到同一框架中的模型。
1 MIN READ
借助 NVIDIA NV-Tesseract-AD 推进行业应用的异常检测
2025年 9月 29日
利用 Newton 引擎的神经动力学推进机器人技术的发展
现代机器人技术对动力学的需求,已超出经典解析动力学的能力范畴。经典解析动力学存在接触简化、运动学环路省略及模型不可微等问题,
2 MIN READ
利用 Newton 引擎的神经动力学推进机器人技术的发展
2025年 9月 29日
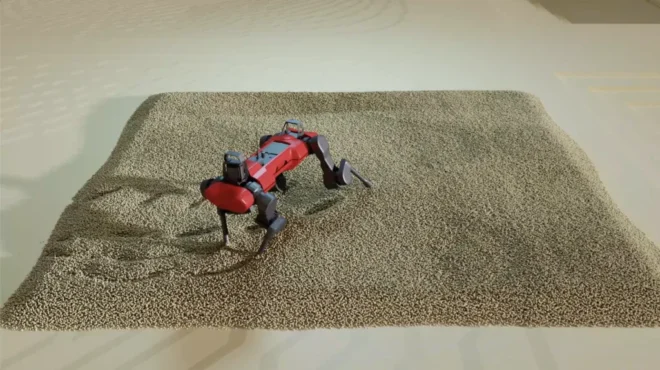
借助 NVIDIA Isaac Lab 和 Newton 训练四足机器人运动策略并对布料操作进行仿真
物理在机器人仿真中发挥着至关重要的作用,它为机器人在真实环境中的行为及交互提供了精准的虚拟呈现基础。借助仿真器,研究人员和工程师能够以安全、
3 MIN READ
借助 NVIDIA Isaac Lab 和 Newton 训练四足机器人运动策略并对布料操作进行仿真
2025年 9月 29日
使用 NVIDIA Isaac Lab 和 Newton 训练四足运动策略并模拟布料操作
物理学在机器人仿真中起着关键作用,为机器人在现实环境中的行为与交互提供了精确的虚拟呈现基础。借助这些仿真工具,研究人员和工程师能够以更安全、
3 MIN READ
使用 NVIDIA Isaac Lab 和 Newton 训练四足运动策略并模拟布料操作
2025年 9月 29日
在 NVIDIA Isaac Lab 2.3 中通过全身控制和增强远程操作简化机器人学习
从现实世界演示中训练机器人策略不仅成本高、耗时长,还容易导致过拟合,从而限制了在不同任务和环境中的泛化能力。相比之下,
3 MIN READ
在 NVIDIA Isaac Lab 2.3 中通过全身控制和增强远程操作简化机器人学习
2025年 9月 29日
在 NVIDIA Isaac Lab 2.3 中使用全身控制和增强遥操作,简化机器人学习
基于真实世界演示训练机器人策略,不仅成本高、速度慢,还容易出现过拟合问题,进而限制其在不同任务与环境中的泛化能力。
3 MIN READ
在 NVIDIA Isaac Lab 2.3 中使用全身控制和增强遥操作,简化机器人学习
2025年 9月 26日
为什么 CVE 属于框架和应用,而非 AI 模型
通用漏洞与暴露(CVE)系统是用于记录软件安全漏洞的全球标准。该计划由MITRE公司维护,并得到CISA的支持,
1 MIN READ
为什么 CVE 属于框架和应用,而非 AI 模型
2025年 9月 23日
借助生成式 AI 通过分子合成途径进行推理
无论是制药、化学还是材料应用,分子设计中反复出现的挑战在于构建可合成的分子。合成性评估通常需要绘制分子的合成路径:
2 MIN READ
借助生成式 AI 通过分子合成途径进行推理
2025年 9月 23日
借助 NVIDIA NeMo 在 FP8 精度下提高训练吞吐量
在之前关于 FP8 训练的博文中,我们探讨了 FP8 精度的基础知识 并深入分析了适用于大规模深度学习的 多种扩展方法。
3 MIN READ
借助 NVIDIA NeMo 在 FP8 精度下提高训练吞吐量
2025年 9月 17日
用于降低 AI 推理延迟的预测性解码简介
使用大语言模型(LLM)生成文本时,通常会面临一个基本瓶颈。尽管 GPU 能够提供强大的计算能力,但由于自回归生成本质上是顺序进行的,
2 MIN READ
用于降低 AI 推理延迟的预测性解码简介
2025年 9月 16日
利用 NVIDIA Run:ai 模型流技术降低大型语言模型推理的冷启动延迟
部署大语言模型(LLM)在优化推理效率方面带来了显著挑战。其中,冷启动延迟——即模型加载到 GPU 显存所需的时间较长…
5 MIN READ
利用 NVIDIA Run:ai 模型流技术降低大型语言模型推理的冷启动延迟
2025年 9月 10日
借助 NVIDIA RTX PRO Blackwell 服务器版本,将蛋白质结构推理速度提高 100 多倍
了解蛋白质结构的研究比以往任何时候都更加重要。从加快药物研发到为未来可能的疫情做好准备,
2 MIN READ
借助 NVIDIA RTX PRO Blackwell 服务器版本,将蛋白质结构推理速度提高 100 多倍
加载更多