Posts by Aravindh Shanmuganathan
机器人
2025年 9月 29日
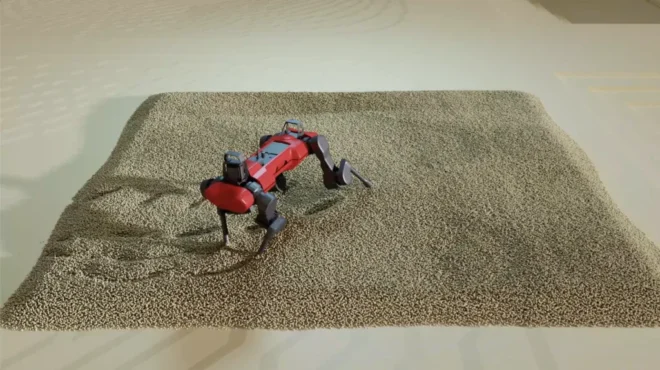
借助 NVIDIA Isaac Lab 和 Newton 训练四足机器人运动策略并对布料操作进行仿真
物理在机器人仿真中发挥着至关重要的作用,它为机器人在真实环境中的行为及交互提供了精准的虚拟呈现基础。借助仿真器,研究人员和工程师能够以安全、
3 MIN READ

机器人
2025年 9月 29日
使用 NVIDIA Isaac Lab 和 Newton 训练四足运动策略并模拟布料操作
物理学在机器人仿真中起着关键作用,为机器人在现实环境中的行为与交互提供了精确的虚拟呈现基础。借助这些仿真工具,研究人员和工程师能够以更安全、
3 MIN READ