dwGlobalEgomotionResult Struct Reference
Detailed Description
Holds global egomotion state estimate.
Definition at line 51 of file GlobalEgomotionTypes.h.
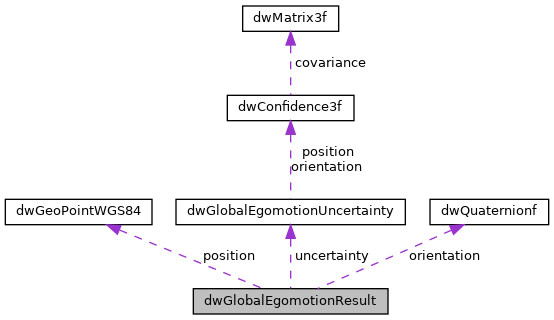
Collaboration diagram for dwGlobalEgomotionResult:
Data Fields | |
| dwGeoPointWGS84 | position |
| Position in WGS-84 reference system. More... | |
| dwQuaternionf | orientation |
| Rotation from rig coordinate system to ENU coordinate system. More... | |
| bool | validPosition |
Indicates validity of position estimate. More... | |
| bool | validOrientation |
Indicates validity of orientation estimate. More... | |
| dwTime_t | timestamp |
| Estimate timestamp. More... | |
| dwGlobalEgomotionUncertainty | uncertainty |
Field Documentation
◆ orientation
| dwQuaternionf dwGlobalEgomotionResult::orientation |
Rotation from rig coordinate system to ENU coordinate system.
Definition at line 54 of file GlobalEgomotionTypes.h.
◆ position
| dwGeoPointWGS84 dwGlobalEgomotionResult::position |
Position in WGS-84 reference system.
Definition at line 53 of file GlobalEgomotionTypes.h.
◆ timestamp
| dwTime_t dwGlobalEgomotionResult::timestamp |
Estimate timestamp.
Definition at line 57 of file GlobalEgomotionTypes.h.
◆ uncertainty
| dwGlobalEgomotionUncertainty dwGlobalEgomotionResult::uncertainty |
Definition at line 58 of file GlobalEgomotionTypes.h.
◆ validOrientation
| bool dwGlobalEgomotionResult::validOrientation |
Indicates validity of orientation estimate.
Definition at line 56 of file GlobalEgomotionTypes.h.
◆ validPosition
| bool dwGlobalEgomotionResult::validPosition |
Indicates validity of position estimate.
Definition at line 55 of file GlobalEgomotionTypes.h.
The documentation for this struct was generated from the following file: