dwCalibrationOdometryPropertiesParameters Struct Reference
Detailed Description
Parameters for calibrating the odometry properties.
Definition at line 290 of file CalibrationTypesExtra.h.
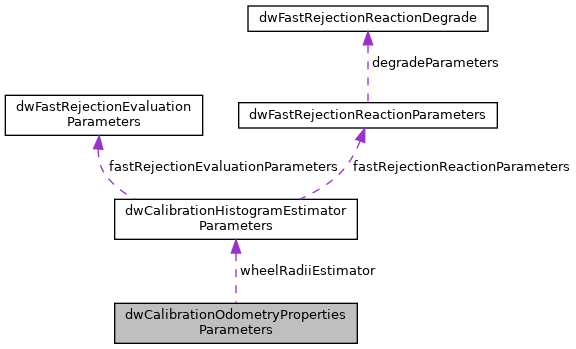
Collaboration diagram for dwCalibrationOdometryPropertiesParameters:
Data Fields | |
| dwCalibrationHistogramEstimatorParameters | wheelRadiiEstimator |
| wheel radii estimator settings More... | |
| float32_t | minimalSpeedMeterPerSec |
| minimal speed below which we ignore any samples (default 4m/s) More... | |
| float32_t | maximalSteeringRad |
| maximal steering angle above which we ignore any samples (default 2deg) More... | |
| float32_t | maxLongitudinalAccelerationInMeterPerSecSquared |
| Maximal acceleration above which we ignore any samples (default 2m/s^2) More... | |
Field Documentation
◆ maximalSteeringRad
| float32_t dwCalibrationOdometryPropertiesParameters::maximalSteeringRad |
maximal steering angle above which we ignore any samples (default 2deg)
Definition at line 300 of file CalibrationTypesExtra.h.
◆ maxLongitudinalAccelerationInMeterPerSecSquared
| float32_t dwCalibrationOdometryPropertiesParameters::maxLongitudinalAccelerationInMeterPerSecSquared |
Maximal acceleration above which we ignore any samples (default 2m/s^2)
Definition at line 303 of file CalibrationTypesExtra.h.
◆ minimalSpeedMeterPerSec
| float32_t dwCalibrationOdometryPropertiesParameters::minimalSpeedMeterPerSec |
minimal speed below which we ignore any samples (default 4m/s)
Definition at line 297 of file CalibrationTypesExtra.h.
◆ wheelRadiiEstimator
| dwCalibrationHistogramEstimatorParameters dwCalibrationOdometryPropertiesParameters::wheelRadiiEstimator |
wheel radii estimator settings
Definition at line 294 of file CalibrationTypesExtra.h.
The documentation for this struct was generated from the following file: