自动驾驶汽车的发展与规模有关。工程师必须收集并标记大量数据,以训练自动驾驶神经网络。
然后,这些数据被用于测试和验证 AV 系统,这也是确保鲁棒性的一项巨大任务。仿真是达到这一规模的重要工具,但准确性是其有效性的关键。
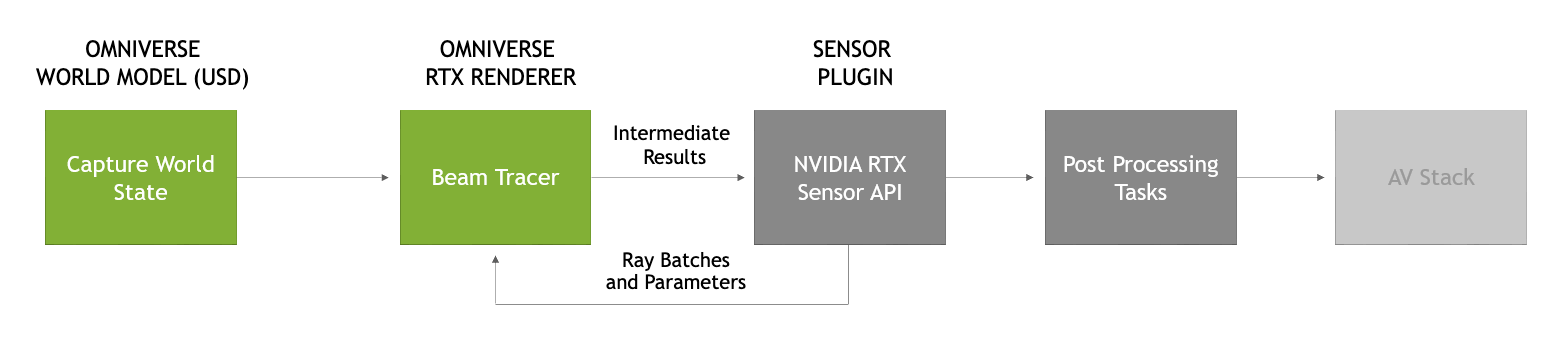
NVIDIA DRIVE Sim 建立在 NVIDIA Omniverse 的基础上,通过基于物理的端到端仿真平台解决了这一挑战,该平台从一开始就构建为运行大规模、物理精确的多传感器仿真。它使您能够生成合成数据,以训练 AV 感知,并在具有高保真度和精确传感器数据的闭环模拟中验证运动控制。
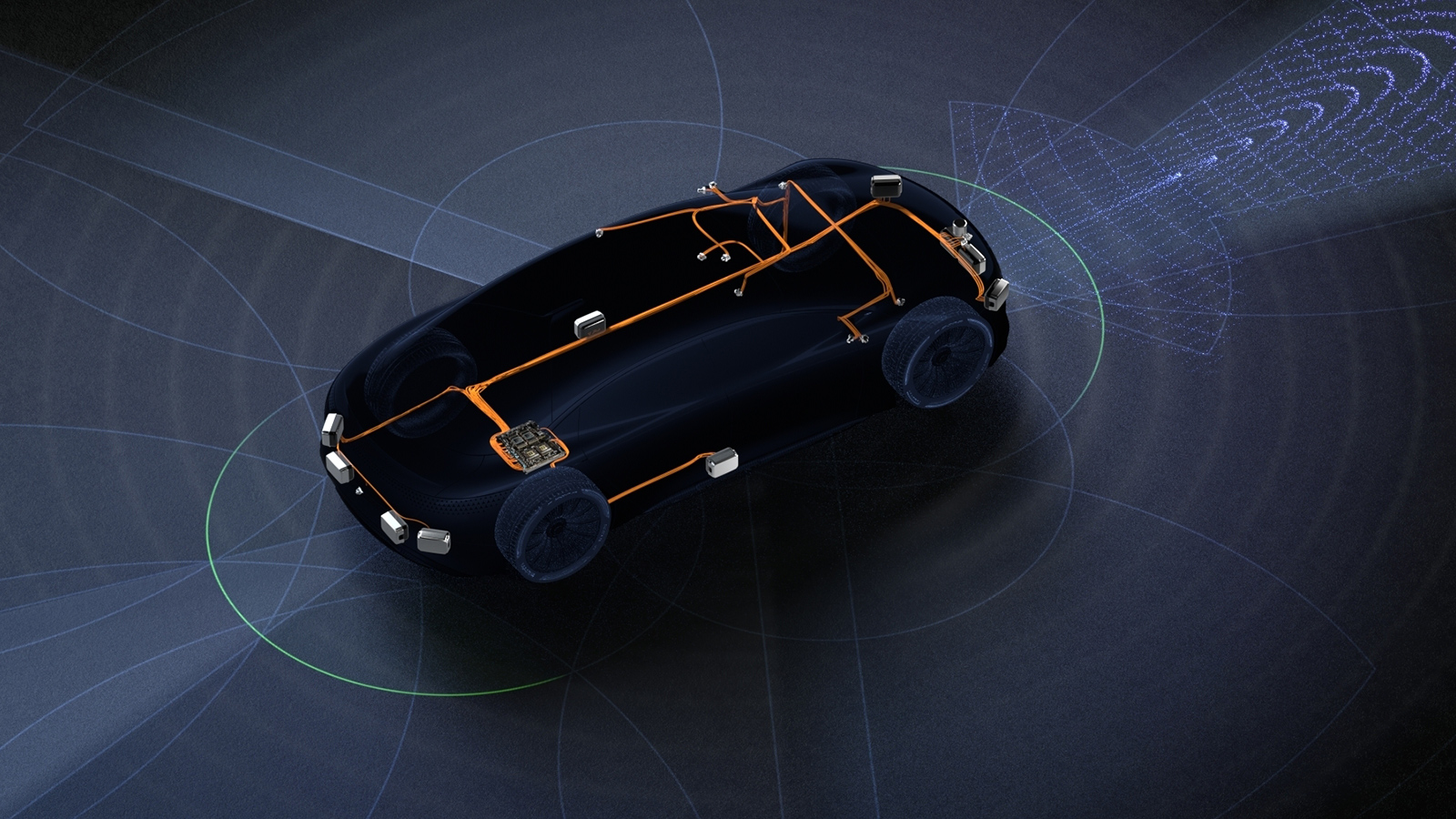
AV 传感器可分类如下:
- 被动: 摄像机
- 主动: 激光雷达、雷达和超声波
这种验证我们的模型与现实相符的能力确保了 DRIVE Sim 产生值得信赖的结果。现在,我们将分享我们为将激光雷达模型与现实世界相关联所做的工作。在 Lidar Validation 白皮书中,我们介绍了用于验证 DRIVE Sim 激光雷达模型的准确性和精度的过程。
在 NVIDIA ,我们探索了多种方法来实现传感器验证,例如比较基于真实数据训练的神经网络和基于合成数据训练的网络。此外,我们通过将合成数据本身与传感器的规格和真实世界的实验进行比较来验证传感器的准确性。
阅读 Lidar Validation 白皮书,这是关于模拟中传感器验证的系列文章中的第二篇,并赶上上一篇文章 camera sensor validation 。