自动驾驶汽车( AVs )必须能够安全地处理现实世界中可能遇到的任何类型的交通场景。这包括危险的近距离事故,交通中其他道路使用者的意外操作可能导致碰撞。
然而,在这些类型的场景中开发和测试 AV 具有挑战性。真实世界中的碰撞数据是稀疏的,在真实世界中重新创建这种情况是危险的,并且难以扩展。
要了解 NVIDIA 的最新研究,该研究使用 AI 在模拟中自动生成事故场景,以进行安全和可扩展的 AV 测试,请观看下面的 NVIDIA DRIVE Labs video 。
我们将以工程为重点,关注各个自动驾驶汽车挑战以及 NVIDIA DRIVE 团队如何应对这些挑战。赶上
使用 STRIVE 对 AV 计划器进行压力测试
在 AV 堆栈中, planner module 负责决定自我车辆应该如何驾驶。彻底测试计划器需要模拟潜在事故交通场景的真实和多样的数据集。
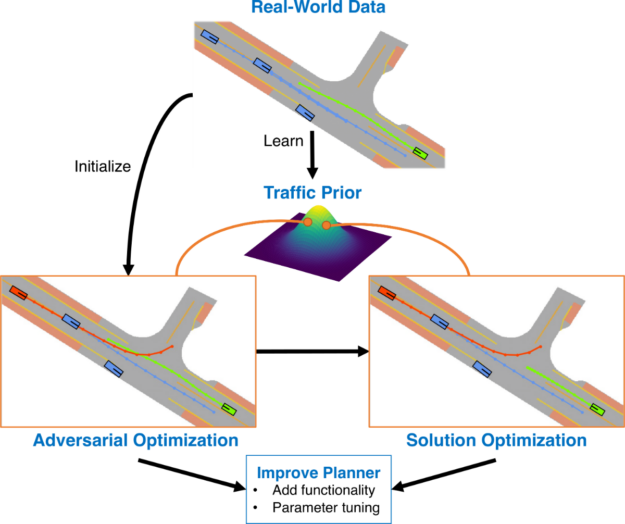
我们开发了一种名为 STRIVE ( S stress- T estD rive )的方法,为 AV 规划师创建了一组丰富的事故场景(图 1 )。规划器的行为可以通过分析其在模拟中失败的地方,并在部署到真实道路上之前进行纠正来改善。
通过优化产生潜在事故
STRIVE 从一个真实世界场景开始,在这个场景中, AV 计划员按照预期执行。它使用对抗性优化来修改场景中车辆的 2D 轨迹,以引起与 AV 的碰撞。与 AV 碰撞的对手车辆可以由用户指定或在优化期间自动选择。
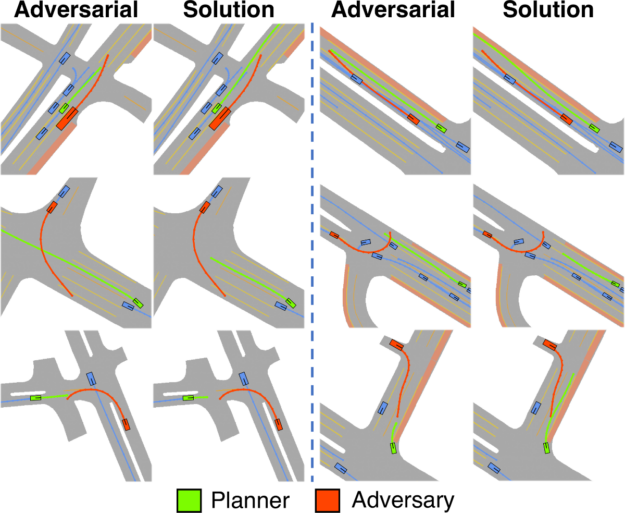
第二个解决方案优化为飞行器找到了避免事故的策略,以提高计划器的能力。 STRIVE 使用有用的解决方案来改善 AV ,从而创造出现实和多样的事故(图 2 )。
真实的数据驱动交通模型
模拟事故必须真实,准确反映真实的交通状况和物理现象。 STRIVE 使用人工智能交通模型,通过在大型真实世界数据集上进行训练,学习真实的车辆轨迹。该模型如图 1 中的 Traffic Prior 所示。在优化过程中, STRIVE 会检查这个经过训练的人工智能模型,以确保生成的场景仍然真实,即使它包含意外。
从 2D 轨迹到 3D 仿真
在 NVIDIA DRIVE Sim 中使用 STRIVE 来创建交叉口处事故的几种变化。 STRIVE 从从真实驾驶中重建的常规交通开始,使用不同的车辆产生多起可能的事故(图 3 )。

结论
STRIVE 在模拟中自动创建罕见和危险的潜在事故场景。使用此工具, AV 开发人员可以全面培训和评估自动驾驶系统,以确保其安全运行。在车辆之间生成可能的碰撞只是如何在人工智能模拟中控制交通的一个例子。我们正在努力将数据驱动模型纳入所有类型的交通模拟,包括行人、骑车人和场景编辑。
其他资源
要了解更多信息,请查看以下相关资源:
- STRIVE project page
- Generating Useful Accident-Prone Driving Scenarios via a Learned Traffic Prior
- STRIVE code on GitHub
- DRIVE Sim Scenario Reconstruction, Powered by NVIDIA Omniverse
Register for NVIDIA GTC 2023 for free 并于 3 月 20 日至 23 日加入我们,参加以下相关会议:
- Revolutionizing AV Development with Generative AI
- Building Trust in AI for Autonomous Vehicles
- Data-Driven AV Safety