Point-Voxel CNN for Efficient 3D Deep Learning
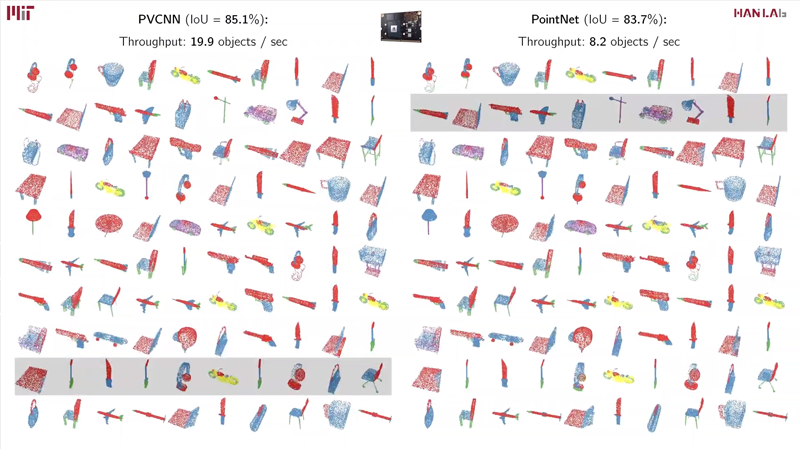
In our NeurIPS’19 paper, we propose Point-Voxel CNN (PVCNN), an efficient 3D deep learning method for various 3D vision applications. Here we show the 3D object segmentation demo which runs at 20 FPS on Jetson Nano. Note that the most efficient previous model, PointNet, runs at only 8 FPS. We also show the performance of 3D indoor scene segmentation with our PVCNN and PointNet on Jetson AGX Xavier. Remarkably, our network takes just 2.7 seconds to process more than one million points, while the PointNet takes more than 4.1 seconds and achieves around 9% worse mIoU comparing with our method.
Buy Jetson to Get Started
Bring your edge AI, computer vision or robotics ideas to life with a Jetson developer kit.
Explore Products