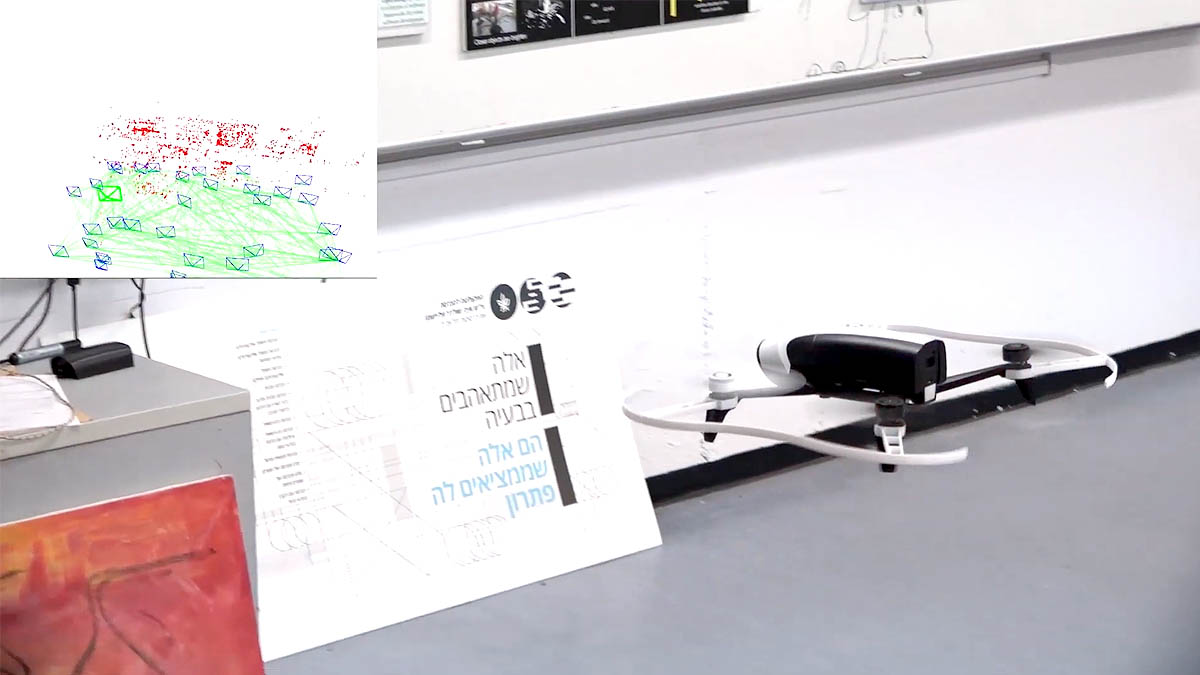
Autonomous drone using ORBSLAM2 on the Jetson Nano
Run ORBSLAM2 and implement close-loop position control in real time on Jetson Nano using recorded rosbags (e.g., EUROC) or live footage from a Bebop2 Drone. Tested with [realtime] monocular camera using OrbSLAM2 and Bebop2. In the Autonomous Drones Lab at Tel Aviv University, we research, develop and implement solutions for autonomous navigation in GPS-denied environments. [To] validate our solution, we work mainly on prototype drones to achieve a quick integration between hardware, software and the algorithms.
Buy Jetson to Get Started
Bring your edge AI, computer vision or robotics ideas to life with a Jetson developer kit.
Explore Products