Understanding Simulation and Validation
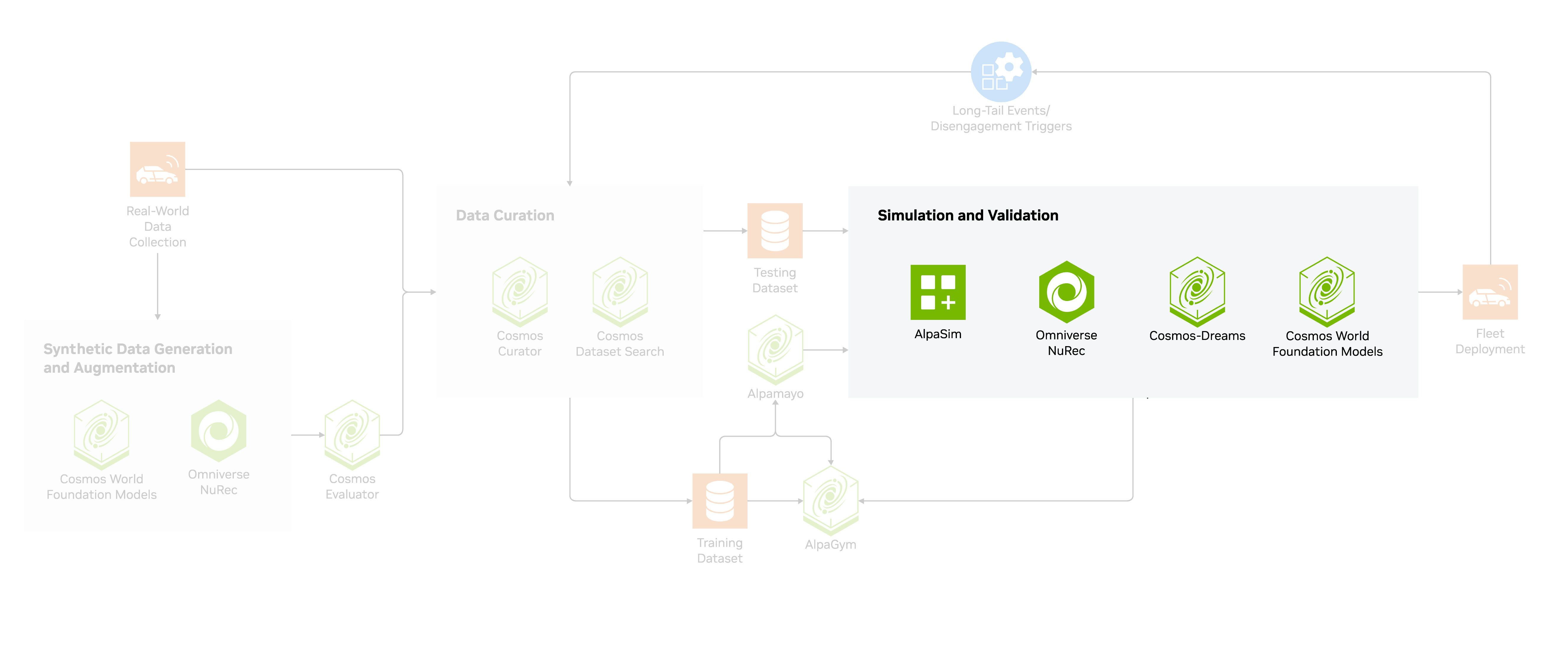
Simulation for autonomous vehicles starts from reconstructed real-world scenes and synthetic data. Real-world, multi-sensor driving data becomes high-fidelity 3D environments through neural reconstruction with NVIDIA Omniverse™ NuRec, while NVIDIA Cosmos™ world foundation models and NVIDIA Cosmos-Dreams generate novel scenario variations across weather, lighting, and long-tail edge cases.
Driving stacks are then validated in closed-loop using NVIDIA AlpaSim, an open source simulation framework that surfaces policy behavior across millions of virtual scenarios.
Explore Simulation Technologies
AlpaSim
NVIDIA AlpaSim is an open simulation framework that combines Omniverse NuRec scenes, configurable traffic and policy models, and scalable closed‑loop testing to iterate AV stacks over millions of virtual miles.
Omniverse NuRec
NVIDIA Omniverse Nurec is a set of Gaussian-based libraries that reconstruct and render interactive simulation from real-world driving data, accelerating high-fidelity simulation at scale.
Cosmos-Dreams
NVIDIA Cosmos-Dreams is a generative world model built on NVIDIA Cosmos™ that synthesizes photorealistic closed-loop driving environments from real-world driving data or simulation inputs.
Simulation and Validation Learning Resources
Other DRIVE Resources
Model Development
Build and train reasoning-based AV models with open datasets, tools, and frameworks.
DRIVE AGX
Get developer kits and SDKs for in-vehicle compute development.
Download Center
Download DRIVE SDKs, open models, and simulation tools.
Support
Ask questions and get answers in our developer forum.