Understanding Simulation and Validation
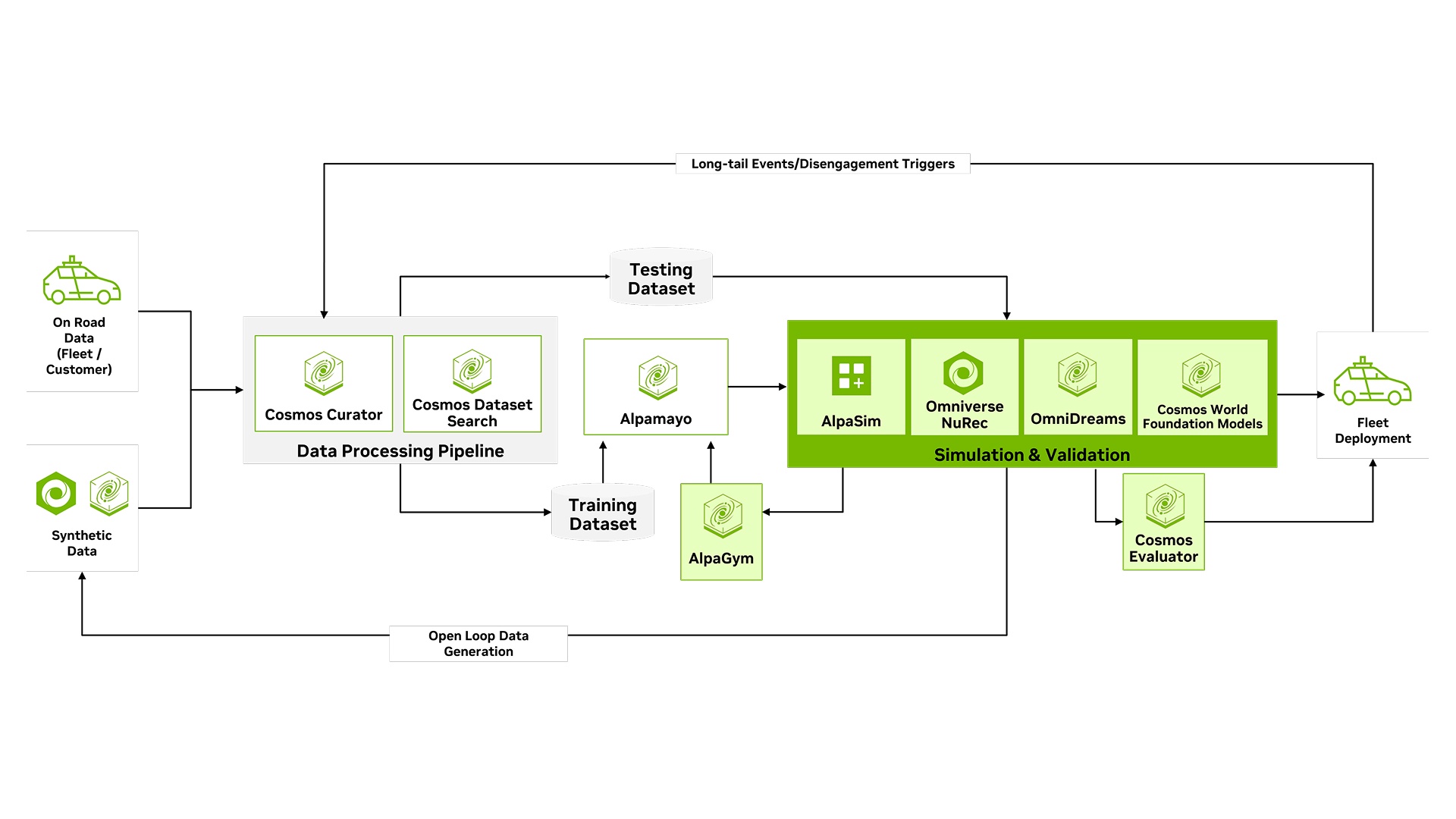
Simulation for autonomous vehicles starts from reconstructed real-world, scenes and synthetic data. Real-world multi-sensor driving data becomes high-fidelity 3D environments through neural reconstruction with NVIDIA Omniverse™ NuRec, while NVIDIA Cosmos™ world foundation models and NVIDIA Cosmos-Dreams generate novel scenario variations across weather, lighting, and long-tail edge cases.
Driving stacks are then validated in closed-loop using NVIDIA AlpaSim, an open source simulation framework that surfaces policy behavior across millions of virtual scenarios.
Click Image to Enlarge
Explore Simulation Technologies
Omniverse NuRec
NVIDIA Omniverse Nurec
reconstructs high‑fidelity 3D worlds from real‑world multi‑sensor driving data. It then renders new sensor views and trajectories for replay, validation, and synthetic data generation.
Alpamayo 2 Super
NVIDIA Alpamayo 2 Super is an open 32-billion-parameter reasoning VLA model that reasons, plans and acts across the full driving stack for safer, scalable level 4 development.
Alpamayo 1.5 is available now. Alpamayo 2 Super is coming soon.
AlpaSim
NVIDIA AlpaSim is an open simulation framework that combines Omniverse NuRec scenes, configurable traffic and policy models, and scalable closed‑loop testing to iterate AV stacks over millions of virtual miles.
AlpaGym
NVIDIA AlpaGym is a closed-loop reinforcement learning framework that improves autonomous driving policy development by training against the compounding errors that open-loop, log-replay training leaves uncorrected.
Cosmos-Dreams
NVIDIA Cosmos-Dreams is a generative world model built on NVIDIA Cosmos that synthesizes photorealistic closed-loop driving environments from real-world driving data or simulation inputs.
Cosmos Transfer 2.5
NVIDIA Cosmos Transfer 2.5 uses world foundation models to generate faster, better photorealistic world variations from text prompts and spatial controls. This expands real‑world driving data into rich scenario families.
Cosmos 3 for AV is coming soon.
Cosmos Predict 2
NVIDIA Cosmos Predict 2 can be post‑trained on AV data to generate single and multiview videos for simulation. This accelerates scenario creation and coverage for downstream training and testing.
Cosmos 3 for AV is coming soon.
Cosmos Evaluator
The NVIDIA Cosmos Evaluator automated scoring system validates synthetic video quality across hallucinations, object correspondence, environment conditions, and attributes at scale.
Autonomous Vehicle Learning Resources
Accelerate AV Simulation With Neural Reconstruction and World Models
Learn how to use NVIDIA Cosmos world foundation models and NuRec APIs to build a data flywheel for AV simulation, from neural scene reconstruction to synthetic scenario generation.
Simplify End-to-End AV Development With New NVIDIA Cosmos Transfer NIM
Learn how to create world models and generate synthetic data (SDG) to accelerate end-to-end AV training, as well as closed-loop training and in-vehicle inference.
Simulate and Scale Real-World AV Data With NuRec and Cosmos on CARLA
Deep dive into the latest open-source CARLA 0.9.16 release, and learn how to use AV simulation pipelines with NuRec and Cosmos Transfer. This session covers neural reconstruction and rendering workflows to bring real-world sensor data into simulation.
Enhance 3D Gaussian Reconstruction Quality for AV Simulation Using NuRec Fixer
Learn how to use NuRec Fixer to transform noisy 3D scenes into a crisp, artifact-free environment ready for AV simulation.